Overview¶
Interpolation
Extrapolation, X-Casting
Variable Transformation
Feature Representation
Operator Learning
Interpolation¶
This is when everything is inside the convex hull of a spatial domain and the period of observations. From a spatial perspective, if we can draw a straight-line between the a query point of interest and two other reference points, then I would consider it an interpolation problem.
Examples:
Weather Stations Extremes
SST <--> SSH
MODIS <--> GOES <--> MSG
Extrapolation¶
X-Casting¶
This is the exclusive case when we are trying to predict outside of the period of interest.
HindCasting,
NowCasting,
ForeCasting,
Climate Projections, ,
Variable Transformation¶
Examples:
SST --> SSH
Satellite Instrument - 2 - Satellite Instrument
Feature Representation¶
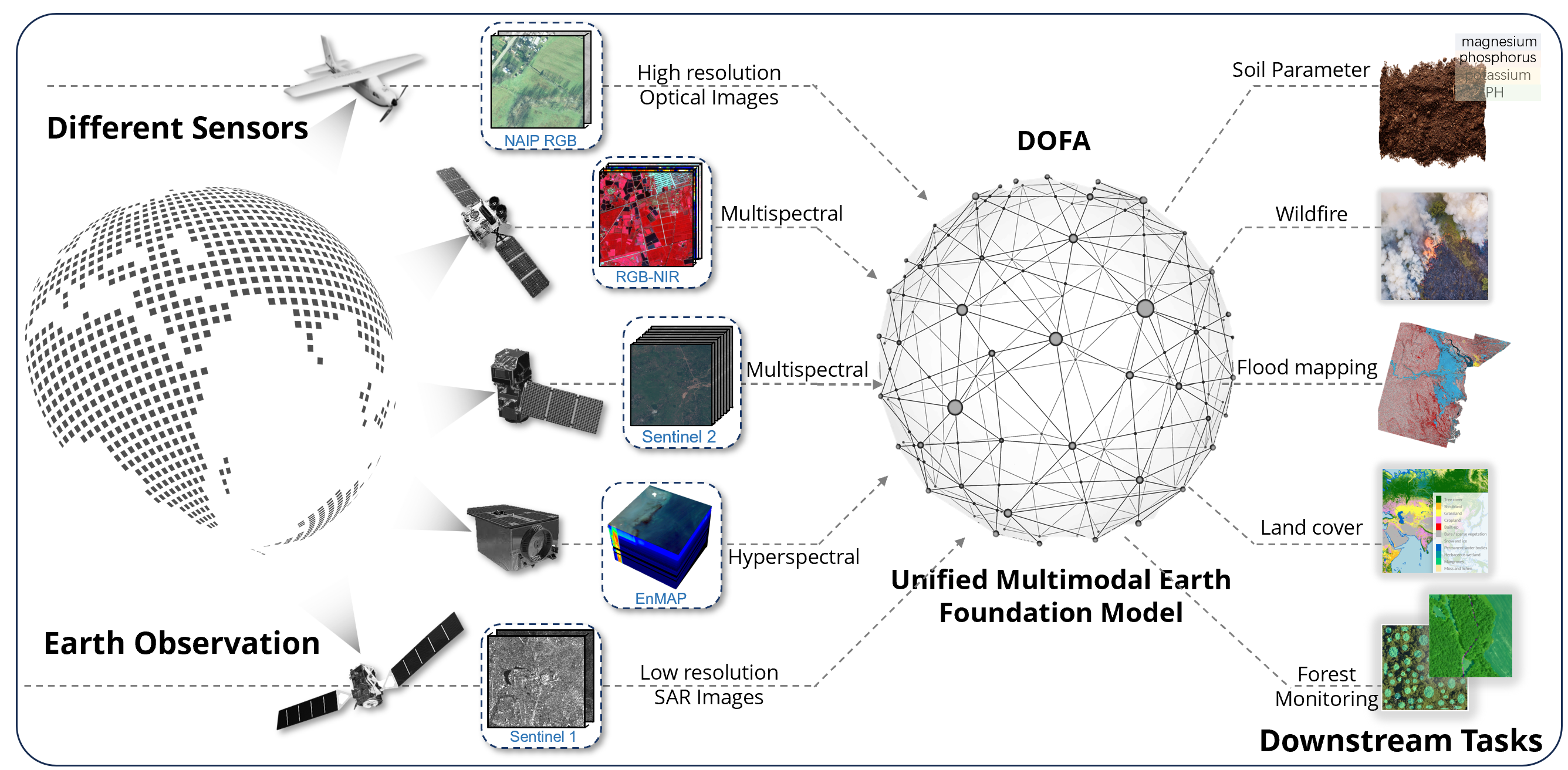
Figure 1:A Model from DOFA whereby they train their model on different modalities for Remote sensing data. Source: GitHub | Paper (arxiv)
This is also known as Representation Learning, Foundational Models
Strategies:
Data Augmentation, e.g., Small-Medium Perturbations
Masking
Examples:
PCA/EOF/POD/SVD
AutoEncoders
Bijective, Surjective, Stochastic
ROM -> AutoEncoders
Linear ROM -> PCA/EOF/POD/SVD, ProbPCA
Simple -> Flow Model
MultiScale -> U-Net
Operator Learning¶
Now, we have broken each of the different problem categories into different subtopics. However, we can easily have a case whereby we have each a single problem category or a combination of all problem categories. There is an umbrella term which encompasses all of the aforementioned stuff.
Now, we wish to learn some.
Normally, we can break this into steps. This is also known as lift and learn.
Learn a good representation network which encodes our data from an infinite domain into a finite latent domain.
Do the computations in finite dimensional space.
Learn a reconstruction function from the finite dimensional latent domain to another infinite dimensional domain.
Examples:
Unstructured <--> Irregular, e.g. CloudSAT + MODIS
Irregular <--> Regular, e.g., AlongTrack + Grid
Regular <--> Regular, e.g., GeoStationary I + GeoStationary II