Patching — geometry gallery (Rectangular, SphericalCap, KNN, …)
Patching geometries gallery¶
SpatialPatcher ships five Geometry types, each dispatching on the
Domain it gets handed. This notebook walks through the four
canonical (Geometry × Domain) pairings against three real
substrates — one per data shape:
SpatialRectangular×RasterDomain— tiling a Sentinel-2 chip.SpatialSphericalCap×GridDomain— geodesic cap on a lat/lon grid (1° resolution global cell index).SpatialKNNGraph×PointDomain— k-nearest GBIF occurrence points (California live oak, Quercus agrifolia).SpatialRadiusGraph×PointDomain— same point cloud, within-radius neighbourhood.
import matplotlib.pyplot as plt
import numpy as np
from geopatcher import (
GridDomain,
PointDomain,
RasterField,
SpatialBoxcar,
SpatialByIndex,
SpatialExplicit,
SpatialKNNGraph,
SpatialPatcher,
SpatialRadiusGraph,
SpatialRectangular,
SpatialRegularStride,
SpatialSphericalCap,
)
from scipy.spatial import cKDTree
from geostack import LAKE_TAHOE_BBOX, load_gbif_points, load_s2_chip1. SpatialRectangular × RasterDomain — tiling a real Sentinel-2 chip¶
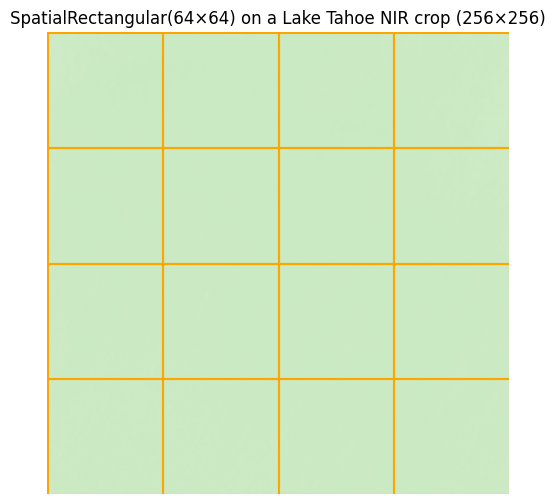
The Lake Tahoe BGRN chip’s NIR band, downsampled to 256×256 so the patch overlay reads at a glance.
gt_bgrn = load_s2_chip(bbox=LAKE_TAHOE_BBOX)
nir_full = np.asarray(gt_bgrn)[3].astype("float32") * 1e-4
# Take a 256×256 corner crop for visual clarity.
crop = nir_full[600:856, 200:456]
print(f"crop shape: {crop.shape}")
import rasterio
from georeader.geotensor import GeoTensor
crop_transform = gt_bgrn.transform * rasterio.Affine.translation(200, 600)
field = RasterField(
GeoTensor(
values=crop,
transform=crop_transform,
crs=gt_bgrn.crs,
fill_value_default=0.0,
)
)
patcher = SpatialPatcher(
geometry=SpatialRectangular(size=(64, 64)),
sampler=SpatialRegularStride(step=64),
window=SpatialBoxcar(),
aggregation=SpatialByIndex(),
)
fig, ax = plt.subplots(figsize=(6, 6))
ax.imshow(crop, cmap="Greens", vmin=0, vmax=0.5)
for patch in patcher.split(field):
w = patch.indices
ax.add_patch(
plt.Rectangle(
(w.col_off, w.row_off),
w.width,
w.height,
fill=False,
edgecolor="orange",
linewidth=1.5,
)
)
ax.set_title("SpatialRectangular(64×64) on a Lake Tahoe NIR crop (256×256)")
ax.axis("off")
plt.show()crop shape: (256, 256)
2. SpatialSphericalCap × GridDomain — geodesic neighbourhoods¶
A 1° regular lat/lon grid spanning ±60° latitude is a faithful stand-in for any global gridded product (ERA5, NOAA SST, MODIS climate). The cap shrinks in pixel terms as latitude increases because grid cells are smaller meridionally at high latitudes — something a naive raster patcher would never see.
lat = np.arange(-60.0, 60.5, 1.0) # 121 cells
lon = np.arange(-180.0, 180.5, 1.0) # 361 cells
grid = GridDomain(coords={"lat": lat, "lon": lon})
cap = SpatialSphericalCap(radius_km=1500.0)
anchors = [(0.0, 0.0), (45.0, 0.0)] # equator + mid-latitude
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
for ax, (a_lat, a_lon) in zip(axes, anchors, strict=True):
neigh = cap.neighborhood(grid, anchor=(a_lat, a_lon))
mask = np.zeros((len(lat), len(lon)), dtype=bool)
mask[neigh[:, 0], neigh[:, 1]] = True
ax.imshow(
mask,
origin="lower",
cmap="Greens",
extent=(lon[0], lon[-1], lat[0], lat[-1]),
)
ax.scatter([a_lon], [a_lat], c="red", marker="*", s=120, zorder=3)
ax.set_title(f"SphericalCap(r=1500 km) @ ({a_lat:.0f}°, {a_lon:.0f}°)\n{len(neigh)} cells")
ax.set_xlabel("lon")
ax.set_ylabel("lat")
plt.suptitle("Cap sizes track geodesic distance, not pixel count")
plt.tight_layout()
plt.show()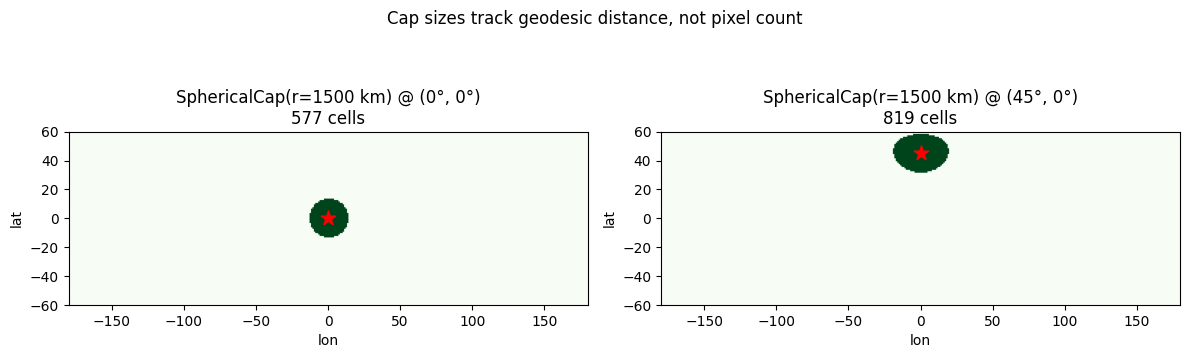
3. SpatialKNNGraph × PointDomain — k-nearest GBIF occurrences¶
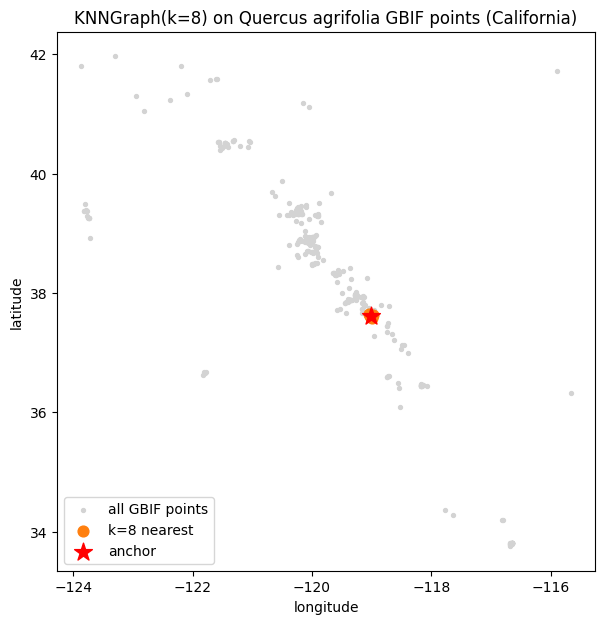
500 GBIF occurrence records for California live oak (Quercus agrifolia, taxon key 5285750) across California. Each point is a real observation report — the cluster structure (coastal ranges, valley centres, sparse desert) is the true ecological signal.
gbif_df = load_gbif_points(species_key=5285750, limit=500)
print(f"GBIF: {len(gbif_df)} occurrence points for Q. agrifolia")
pts = np.column_stack([gbif_df.geometry.x.values, gbif_df.geometry.y.values])
point_domain = PointDomain(coords=pts, kdtree=cKDTree(pts))
knn = SpatialKNNGraph(k=8)
anchor = pts[len(pts) // 2] # an arbitrary record near the median
neigh_knn = knn.neighborhood(point_domain, anchor=anchor)
fig, ax = plt.subplots(figsize=(8, 7))
ax.scatter(pts[:, 0], pts[:, 1], c="lightgray", s=8, label="all GBIF points")
ax.scatter(
pts[neigh_knn, 0], pts[neigh_knn, 1],
c="C1", s=60, label=f"k={len(neigh_knn)} nearest",
)
ax.scatter([anchor[0]], [anchor[1]], c="red", s=180, marker="*", label="anchor")
ax.set_xlabel("longitude")
ax.set_ylabel("latitude")
ax.set_title("KNNGraph(k=8) on Quercus agrifolia GBIF points (California)")
ax.legend()
ax.set_aspect("equal")
plt.show()GBIF: 300 occurrence points for Q. agrifolia
4. SpatialRadiusGraph × PointDomain — within-radius neighbours¶
Same point cloud, but the geometry asks “every occurrence within 0.25° of the anchor” instead of “the k nearest”. The neighbourhood size now adapts to the local point density — sparse desert anchors return few neighbours, dense coastal anchors return many.
radius = SpatialRadiusGraph(radius=0.25) # ~28 km at this latitude
neigh_radius = radius.neighborhood(point_domain, anchor=anchor)
fig, ax = plt.subplots(figsize=(8, 7))
ax.scatter(pts[:, 0], pts[:, 1], c="lightgray", s=8, label="all GBIF points")
ax.scatter(
pts[neigh_radius, 0], pts[neigh_radius, 1],
c="C2", s=60, label=f"within r=0.25° (n={len(neigh_radius)})",
)
ax.scatter([anchor[0]], [anchor[1]], c="red", s=180, marker="*", label="anchor")
ax.add_patch(plt.Circle(anchor, 0.25, fill=False, edgecolor="C2", linestyle="--"))
ax.set_xlabel("longitude")
ax.set_ylabel("latitude")
ax.set_title(f"RadiusGraph(radius=0.25°) — picks up {len(neigh_radius)} nearby occurrences")
ax.legend()
ax.set_aspect("equal")
plt.show()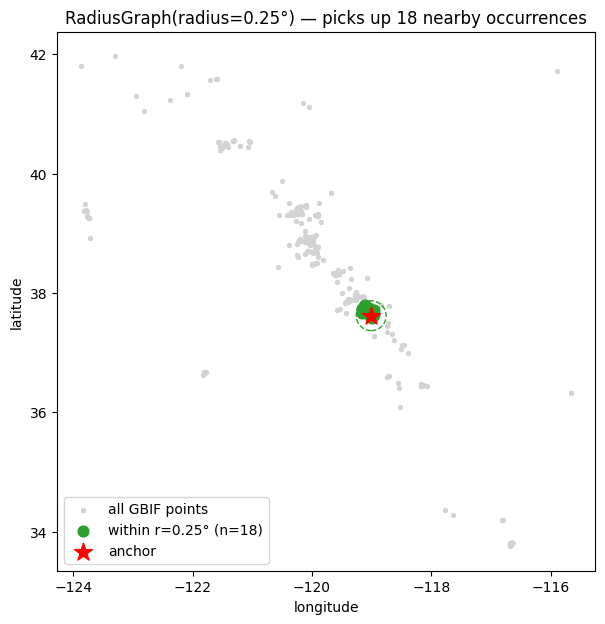
5. ByIndex aggregation — irregular graph patching¶
When patches don’t form a dense grid (KNN, RadiusGraph, …) the
natural aggregation is SpatialByIndex, which returns a
{anchor: result} dict rather than trying to reconstruct a global
field. We materialise 3 KNN-graph patches anchored at three
different GBIF points.
graph_patcher = SpatialPatcher(
geometry=SpatialKNNGraph(k=5),
sampler=SpatialExplicit(anchors_=[tuple(p) for p in pts[:3]]),
window=SpatialBoxcar(),
aggregation=SpatialByIndex(),
)
# A tiny point-Field adapter so the patcher can pull data per anchor.
class _PointField:
domain = point_domain
def select(self, idx):
return pts[idx]
def with_data(self, x):
return x
patches = list(graph_patcher.split(_PointField()))
print(f"materialised {len(patches)} graph patches:")
for p in patches:
anchor_lat, anchor_lon = p.anchor
print(f" anchor=({anchor_lat:6.3f}, {anchor_lon:6.3f}) k-neighbours={len(p.data)}")materialised 3 graph patches:
anchor=(-118.566, 36.486) k-neighbours=5
anchor=(-119.899, 39.290) k-neighbours=5
anchor=(-123.776, 39.372) k-neighbours=5
Recap — when to reach for which geometry¶
| Geometry | Domain | Use it for |
|---|---|---|
SpatialRectangular | RasterDomain | Tiled raster inference — the bread-and-butter case. |
SpatialSphericalCap | GridDomain | Cells on a global lat/lon grid (ERA5, GHCN, climate model output). |
SpatialKNNGraph | PointDomain | “k nearest sensors / observations / waypoints” — fixed neighbourhood size. |
SpatialRadiusGraph | PointDomain | “every record within R” — density-adaptive neighbourhood size. |
SpatialPolygonIntersection | RasterDomain / VectorDomain | Per-polygon zonal stats. |
All five share the same (Domain, anchor) -> indices contract, so
the rest of the SpatialPatcher (sampler / window / aggregation)
stays unchanged when you swap one out.