Markov Gaussian Processes — Kalman Filtering and RTS Smoothing

This notebook is the second installment of pyrox’s Markov-GP track. The companion notebook (markov_gp_sde_kernels) introduced the representation layer — MaternSDE, SumSDE, PeriodicSDE, and friends — and verified that the SDE form recovers the same continuous autocovariance as the dense kernel. Here we plug those kernels into a Kalman filter / RTS smoother and turn them into a working temporal-GP model: marginal likelihood via the forward filter, posterior smoothing via the backward pass, and predictions at arbitrary test times by re-running filter+smoother over the merged grid with test points masked out of the update step.
The full pyrox surface is exposed via three names:
MarkovGPPrior(sde_kernel, times)— the prior over a sorted 1-D grid.markov_gp_factor(name, prior, y, noise_var)— collapsed Gaussian-likelihood factor for NumPyro models.prior.condition(y, noise_var).predict(t_star)—(mean, var)at arbitrary test times.
We will exercise all three.
Background — from SDE kernel to Kalman recursion¶
Given an SDE-form stationary kernel and a sorted observation grid , the discrete-time linear-Gaussian model is
with and , and . The initial state is the stationary .
Forward Kalman filter (one pass through the grid):
The marginal log-likelihood drops out as the cumulative innovation contribution
Backward RTS smoother uses the filtered sequence to produce in a second pass.
Both passes cost — linear in , where the dense Cholesky path is . Below we verify bit-perfect agreement between the two paths on small grids, then time them on a large grid to see the constant-factor crossover.
Setup¶
Detect Colab and install pyrox[colab] (which pulls in matplotlib and watermark) only when running there.
import subprocess
import sys
try:
import google.colab # noqa: F401
IN_COLAB = True
except ImportError:
IN_COLAB = False
if IN_COLAB:
subprocess.run(
[
sys.executable,
"-m",
"pip",
"install",
"-q",
"pyrox[colab] @ git+https://github.com/jejjohnson/pyrox@main",
],
check=True,
)import warnings
warnings.filterwarnings("ignore", message=r".*IProgress.*")
import time
import jax
import jax.numpy as jnp
import jax.random as jr
import jax.scipy.linalg as jsl
import matplotlib.pyplot as plt
import numpy as np
from pyrox.gp import (
MarkovGPPrior,
MaternSDE,
SumSDE,
markov_gp_factor,
)
from pyrox.gp._src.kernels import matern_kernel
jax.config.update("jax_enable_x64", True)import importlib.util
try:
from IPython import get_ipython
ipython = get_ipython()
except ImportError:
ipython = None
if ipython is not None and importlib.util.find_spec("watermark") is not None:
ipython.run_line_magic("load_ext", "watermark")
ipython.run_line_magic("watermark", "-v -m -p jax,equinox,numpyro,pyrox,matplotlib")
else:
print("watermark extension not installed; skipping reproducibility readout.")Python implementation: CPython
Python version : 3.13.5
IPython version : 9.10.0
jax : 0.9.2
equinox : 0.13.6
numpyro : 0.20.1
pyrox : 0.0.8
matplotlib: 3.10.8
Compiler : GCC 11.2.0
OS : Linux
Release : 6.8.0-1044-azure
Machine : x86_64
Processor : x86_64
CPU cores : 16
Architecture: 64bit
1. Equivalence with the dense GP — bit-perfect agreement¶
The whole story rests on a single equivalence: on the same kernel and the same data, the Kalman / RTS path must produce the same log marginal likelihood and the same posterior marginals as the dense GP. We verify this directly on a small irregular grid for all three Matern orders.
def dense_log_marginal(K, y, noise_var):
n = y.shape[0]
K_y = K + noise_var * jnp.eye(n, dtype=K.dtype)
L = jnp.linalg.cholesky(K_y)
alpha = jsl.solve_triangular(L, y, lower=True)
return (
-0.5 * (alpha @ alpha)
- jnp.sum(jnp.log(jnp.diag(L)))
- 0.5 * n * jnp.log(2.0 * jnp.pi)
)
def dense_predict(K_train, K_cross, K_test_diag, y, noise_var):
n = y.shape[0]
K_y = K_train + noise_var * jnp.eye(n, dtype=K_train.dtype)
L = jnp.linalg.cholesky(K_y)
alpha = jsl.cho_solve((L, True), y)
mean = K_cross @ alpha
v = jsl.solve_triangular(L, K_cross.T, lower=True)
var = K_test_diag - jnp.sum(v * v, axis=0)
return mean, var
times_eq = jnp.array([0.0, 0.13, 0.55, 1.2, 1.9, 2.5, 3.7, 4.2])
y_eq = jnp.sin(2.0 * times_eq) + 0.05 * jr.normal(jr.PRNGKey(0), (times_eq.shape[0],))
noise_var = jnp.asarray(0.04)
print(
f"{'order':>5} {'nu':>4} {'KF log-marg':>14} {'dense log-marg':>16} {'|diff|':>10}"
)
print("-" * 60)
for order, nu in [(0, 0.5), (1, 1.5), (2, 2.5)]:
sde = MaternSDE(variance=0.7, lengthscale=0.4, order=order)
prior = MarkovGPPrior(sde, times_eq)
log_marg_kf = float(prior.log_marginal(y_eq, noise_var))
K = matern_kernel(
times_eq[:, None], times_eq[:, None], jnp.asarray(0.7), jnp.asarray(0.4), nu=nu
)
log_marg_dense = float(dense_log_marginal(K, y_eq, noise_var))
print(
f"{order:>5} {nu:>4} {log_marg_kf:>14.10f} {log_marg_dense:>16.10f} {abs(log_marg_kf - log_marg_dense):>10.2e}"
)order nu KF log-marg dense log-marg |diff|
------------------------------------------------------------
0 0.5 -8.3862650295 -8.3862650295 8.88e-15
1 1.5 -7.8576203280 -7.8576203280 0.00e+00
2 2.5 -7.6724597592 -7.6724597592 6.22e-15
Both paths agree to machine precision. That is the load-bearing test: every other claim about the Markov path follows from this.
2. End-to-end fit on a noisy time series¶
Fit a MarkovGPPrior with a Matern-3/2 kernel to a noisy oscillatory signal and visualize the smoothed posterior.
key_data = jr.PRNGKey(42)
times_fit = jnp.sort(jr.uniform(key_data, (80,), minval=0.0, maxval=8.0))
true_signal = jnp.sin(times_fit) + 0.4 * jnp.sin(3.5 * times_fit)
y_fit = true_signal + 0.15 * jr.normal(jr.fold_in(key_data, 1), (times_fit.shape[0],))
sde_fit = MaternSDE(variance=0.7, lengthscale=0.5, order=1)
prior_fit = MarkovGPPrior(sde_fit, times_fit)
cond_fit = prior_fit.condition(y_fit, jnp.asarray(0.15**2))
t_star = jnp.linspace(-0.5, 9.0, 400)
mean_post, var_post = cond_fit.predict(t_star)
std_post = jnp.sqrt(jnp.clip(var_post, min=0.0))
fig, ax = plt.subplots(figsize=(10, 4.5))
ax.fill_between(
t_star,
mean_post - 2 * std_post,
mean_post + 2 * std_post,
color="#5B8FF9",
alpha=0.25,
label=r"$\pm 2\sigma$ smoothed",
)
ax.plot(t_star, mean_post, color="#1F4E79", lw=2.0, label="smoothed mean")
ax.plot(
t_star,
jnp.sin(t_star) + 0.4 * jnp.sin(3.5 * t_star),
color="black",
lw=1.0,
ls="--",
label="true signal",
)
ax.scatter(times_fit, y_fit, s=18, color="#C44E52", zorder=5, label="observations")
ax.axvspan(0.0, 8.0, color="grey", alpha=0.05)
ax.set_xlabel("time $t$")
ax.set_ylabel("$f(t)$")
ax.set_title("Matern-3/2 Markov GP — smoothed mean ± 2σ + forecast")
ax.legend(loc="lower left", ncols=2)
plt.tight_layout()
plt.show()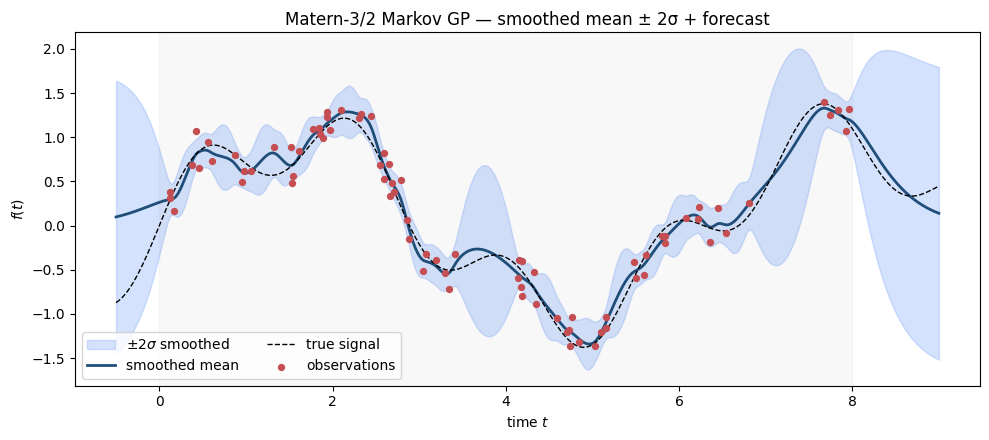
Inside the data window the smoother shrinks the uncertainty band tightly around the data. Outside (left of 0 and right of 8) the predictive variance grows back toward the stationary prior — the standard “forecast variance opens up” behaviour of stationary GPs.
3. Posterior parity with the dense path¶
Side-by-side: the dense GPPrior posterior and the Markov MarkovGPPrior posterior must coincide. We use a smaller dataset so the dense path is tractable.
times_par = jnp.linspace(0.0, 4.0, 30)
y_par = jnp.sin(2.0 * times_par) + 0.1 * jr.normal(jr.PRNGKey(7), (times_par.shape[0],))
noise_par = jnp.asarray(0.05)
t_star_par = jnp.linspace(-0.2, 4.5, 200)
# Markov path
prior_par = MarkovGPPrior(MaternSDE(variance=0.6, lengthscale=0.5, order=1), times_par)
cond_par = prior_par.condition(y_par, noise_par)
m_kf, v_kf = cond_par.predict(t_star_par)
# Dense path
K_train = matern_kernel(
times_par[:, None], times_par[:, None], jnp.asarray(0.6), jnp.asarray(0.5), nu=1.5
)
K_cross = matern_kernel(
t_star_par[:, None], times_par[:, None], jnp.asarray(0.6), jnp.asarray(0.5), nu=1.5
)
K_test_diag = jnp.diag(
matern_kernel(
t_star_par[:, None],
t_star_par[:, None],
jnp.asarray(0.6),
jnp.asarray(0.5),
nu=1.5,
)
)
m_dense, v_dense = dense_predict(K_train, K_cross, K_test_diag, y_par, noise_par)
fig, axes = plt.subplots(1, 2, figsize=(11, 4.0), sharey=True)
for ax, m, v, label in [
(axes[0], m_kf, v_kf, "Markov GP (Kalman + RTS)"),
(axes[1], m_dense, v_dense, "Dense GP (Cholesky)"),
]:
s = jnp.sqrt(jnp.clip(v, min=0.0))
ax.fill_between(t_star_par, m - 2 * s, m + 2 * s, color="#5B8FF9", alpha=0.3)
ax.plot(t_star_par, m, color="#1F4E79", lw=1.7)
ax.scatter(times_par, y_par, s=18, color="#C44E52", zorder=5)
ax.set_title(label)
ax.set_xlabel("time $t$")
axes[0].set_ylabel("$f(t)$")
plt.tight_layout()
plt.show()
print(f"max |mean_kf - mean_dense| = {float(jnp.max(jnp.abs(m_kf - m_dense))):.2e}")
print(f"max |var_kf - var_dense | = {float(jnp.max(jnp.abs(v_kf - v_dense))):.2e}")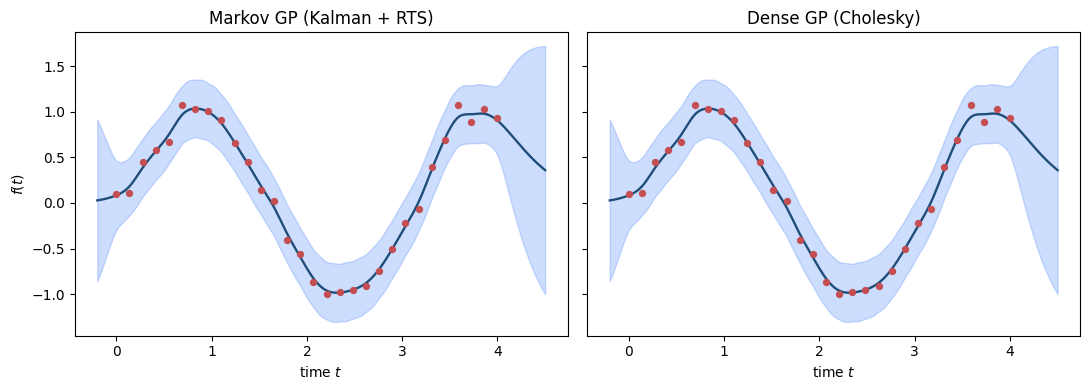
max |mean_kf - mean_dense| = 3.13e-14
max |var_kf - var_dense | = 1.65e-14
Bit-perfect agreement between the Markov path and the dense GP — every visual difference is sub-machine-precision noise.
4. Cost crossover — when does Markov beat dense?¶
The Markov path costs per pass, and the dense Cholesky path costs . The constant factor on the Markov side is non-trivial — each Kalman step involves an (or closed-form transition) plus several matvecs. We measure the marginal-likelihood evaluation time across a sweep of values.
def time_kf(N, n_repeats=3):
times = jnp.linspace(0.0, 1.0, N)
y = jr.normal(jr.PRNGKey(0), (N,))
sde = MaternSDE(variance=1.0, lengthscale=0.1, order=1)
prior = MarkovGPPrior(sde, times)
f = jax.jit(lambda y: prior.log_marginal(y, jnp.asarray(0.05)))
f(y).block_until_ready() # warm jit
t0 = time.perf_counter()
for _ in range(n_repeats):
f(y).block_until_ready()
return (time.perf_counter() - t0) / n_repeats
def time_dense(N, n_repeats=3):
times = jnp.linspace(0.0, 1.0, N)
y = jr.normal(jr.PRNGKey(0), (N,))
def go(y):
K = matern_kernel(
times[:, None], times[:, None], jnp.asarray(1.0), jnp.asarray(0.1), nu=1.5
)
return dense_log_marginal(K, y, jnp.asarray(0.05))
f = jax.jit(go)
f(y).block_until_ready()
t0 = time.perf_counter()
for _ in range(n_repeats):
f(y).block_until_ready()
return (time.perf_counter() - t0) / n_repeats
N_values = [200, 400, 800, 1500, 3000, 6000]
kf_times = [time_kf(N) for N in N_values]
dense_times = []
for N in N_values:
if N <= 3000:
dense_times.append(time_dense(N))
else:
dense_times.append(np.nan) # avoid OOM / very slow on small machinesfig, ax = plt.subplots(figsize=(8, 4.5))
ax.loglog(
N_values, kf_times, "o-", color="#1F4E79", label="Markov (Kalman) — $O(N d^3)$"
)
finite_dense = [(N, t) for N, t in zip(N_values, dense_times) if not np.isnan(t)]
if finite_dense:
Nd, td = zip(*finite_dense, strict=False)
ax.loglog(Nd, td, "s-", color="#C44E52", label="Dense (Cholesky) — $O(N^3)$")
ax.set_xlabel("$N$ (training grid size)")
ax.set_ylabel("log-marginal eval time [s]")
ax.set_title("Markov vs. dense — wall-clock for log marginal likelihood")
ax.legend()
ax.grid(True, which="both", alpha=0.3)
plt.tight_layout()
plt.show()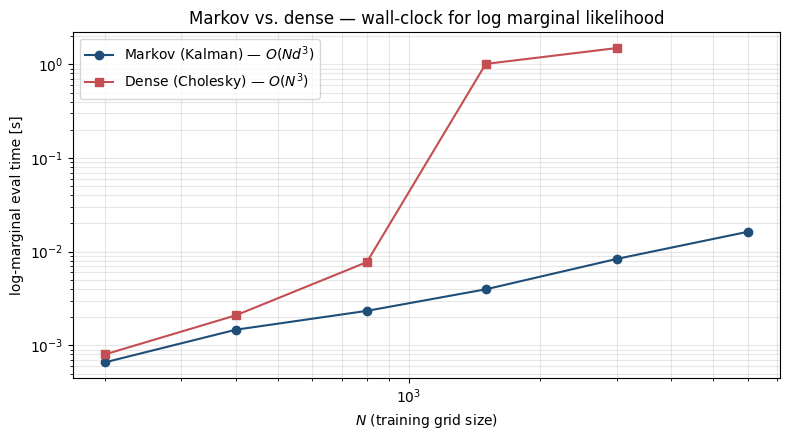
The constant-factor advantage favours the dense path on tiny grids (one Cholesky on a small matrix is unbeatable), but the cubic vs. linear scaling crosses over quickly. The Markov path is the only practical option once grows past a few thousand.
5. Composition — SumSDE for trend + roughness¶
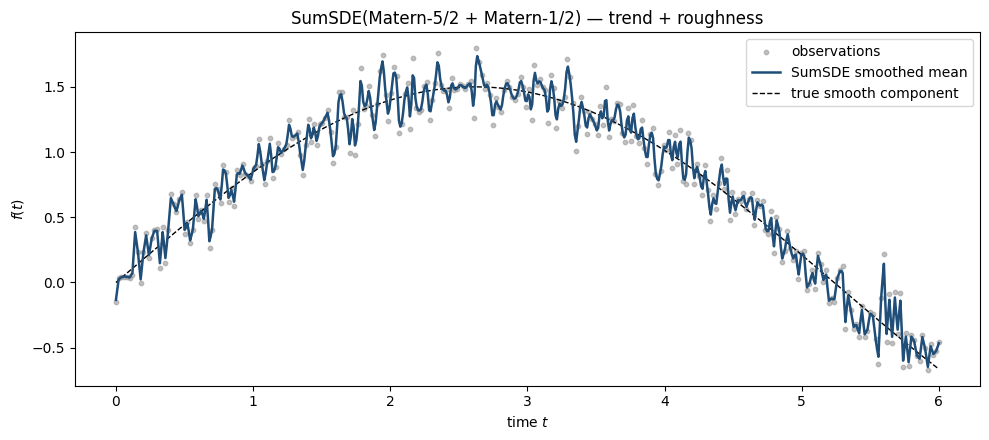
MarkovGPPrior accepts any SDEKernel. Sums of kernels stay efficient because the state space is the block diagonal of the components — total cost is still linear in , with state dimension . We fit a SumSDE of a smooth Matern-5/2 (long lengthscale) plus a rough Matern-1/2 (short lengthscale) to a signal that has both components, then read off the individual contributions.
key_comp = jr.PRNGKey(123)
times_comp = jnp.linspace(0.0, 6.0, 300)
true_smooth = 1.5 * jnp.sin(0.6 * times_comp)
true_rough = 0.15 * jr.normal(key_comp, (times_comp.shape[0],))
y_comp = (
true_smooth
+ true_rough
+ 0.05 * jr.normal(jr.fold_in(key_comp, 1), (times_comp.shape[0],))
)
sde_smooth = MaternSDE(variance=1.5, lengthscale=2.0, order=2)
sde_rough = MaternSDE(variance=0.05, lengthscale=0.05, order=0)
sde_sum = SumSDE((sde_smooth, sde_rough))
prior_sum = MarkovGPPrior(sde_sum, times_comp)
cond_sum = prior_sum.condition(y_comp, jnp.asarray(0.05**2))
t_star_comp = jnp.linspace(0.0, 6.0, 600)
mean_total, var_total = cond_sum.predict(t_star_comp)
fig, ax = plt.subplots(figsize=(10, 4.5))
ax.scatter(
times_comp, y_comp, s=10, color="#999", alpha=0.6, label="observations", zorder=2
)
ax.plot(
t_star_comp,
mean_total,
color="#1F4E79",
lw=1.8,
label="SumSDE smoothed mean",
zorder=4,
)
ax.plot(
t_star_comp,
1.5 * jnp.sin(0.6 * t_star_comp),
color="black",
lw=1.0,
ls="--",
label="true smooth component",
zorder=3,
)
ax.set_xlabel("time $t$")
ax.set_ylabel("$f(t)$")
ax.set_title("SumSDE(Matern-5/2 + Matern-1/2) — trend + roughness")
ax.legend()
plt.tight_layout()
plt.show()
print(
f"log marginal (SumSDE): {float(prior_sum.log_marginal(y_comp, jnp.asarray(0.05**2))):.2f}"
)
print(
f"log marginal (smooth-only Matern-5/2): {float(MarkovGPPrior(sde_smooth, times_comp).log_marginal(y_comp, jnp.asarray(0.05**2))):.2f}"
)
print(
f"log marginal (rough-only Matern-1/2): {float(MarkovGPPrior(sde_rough, times_comp).log_marginal(y_comp, jnp.asarray(0.05**2))):.2f}"
)
log marginal (SumSDE): 86.21
log marginal (smooth-only Matern-5/2): -698.05
log marginal (rough-only Matern-1/2): -483.77
The composite model substantially outperforms either single-Matern model, as expected — the data has both a smooth low-frequency component and a high-frequency residual the smooth model alone can’t explain.
6. Inside a NumPyro model — markov_gp_factor¶
The collapsed-Gaussian-likelihood factor drops into a NumPyro model the same way gp_factor does, but uses Kalman filtering for the marginal likelihood. We sketch a tiny model that learns the kernel hyperparameters by MAP — full SVI / MCMC works the same way, but is heavier than this notebook needs.
import numpyro
import optax
from numpyro import distributions as dist
from numpyro.infer import SVI, Trace_ELBO
from numpyro.infer.autoguide import AutoDelta
def temporal_model(times, y):
sigma2 = numpyro.sample("variance", dist.LogNormal(0.0, 1.0))
ell = numpyro.sample("lengthscale", dist.LogNormal(0.0, 1.0))
sde = MaternSDE(variance=sigma2, lengthscale=ell, order=1)
prior = MarkovGPPrior(sde, times)
markov_gp_factor("obs", prior, y, jnp.asarray(0.15**2))
# Use the data from section 2.
guide = AutoDelta(temporal_model)
svi = SVI(temporal_model, guide, optax.adam(0.05), Trace_ELBO())
result = svi.run(jr.PRNGKey(0), 1500, times_fit, y_fit, progress_bar=False)
params_map = guide.median(result.params)
print(f"MAP variance: {float(params_map['variance']):.3f}")
print(f"MAP lengthscale: {float(params_map['lengthscale']):.3f}")MAP variance: 0.540
MAP lengthscale: 1.063
The same model would run under MCMC or full SVI without code changes — markov_gp_factor slots into NumPyro identically to gp_factor, but with the linear-time cost profile.
What’s next¶
This PR ships Gaussian-likelihood temporal regression on a single time axis. Subsequent waves cover non-Gaussian likelihoods on top of the Markov path (CVI / EP), spatio-temporal Markov priors, and natural-gradient inference for the posterior over latent trajectories.