A spatial GEV — location as a Gaussian process
Pooling that respects geography, fit fast with a Laplace approximation
Abstract¶
The hierarchical model pooled the stations, but blindly — it pulled every station toward one global mean regardless of where it sits. Here we make the pooling spatial: the GEV location becomes μ(s) = μ₀ + f(s) + εₛ, with f a Gaussian-process field over (lon, lat) so nearby stations inform each other, plus a per-station nugget that absorbs local, sub-grid structure. We fit it first with a fast Laplace approximation — a Gaussian centred at the posterior mode — and then confirm that approximation against full NUTS. The result is a continuous location surface with calibrated uncertainty everywhere, including ungauged ground, and 100-year levels far tighter than the independent fits.
A spatial GEV: location as a Gaussian process¶
Notebook 05 pooled the stations with a hierarchical prior and cut the tail uncertainty sharply — but the pooling was spatially blind. Its prior, , is exchangeable: it pulls a station in the cool northern interior and a station on the warm Mediterranean coast toward the same global mean . Geography never enters.
This notebook fixes that. We let the GEV location be a smooth spatial function plus local structure,
with the pieces
- — a Gaussian-process field over . A GP is a prior over smooth functions: the kernel says how strongly two locations are correlated as a function of the distance between them, so values at nearby stations are tied together and the field interpolates smoothly between them. We use a Matérn-3/2 kernel with a fixed regional lengthscale (more on that choice below).
- — a per-station nugget. Spanish station temperatures depend strongly on elevation, which alone cannot see; the nugget absorbs that local variation so the GP field is free to capture the genuinely regional trend rather than being forced to wiggle through every station.
- are global — a deliberate first-model simplification. Notebook 05 already showed the tail ξ pools to a single value anyway; the capstones later let vary in space too.
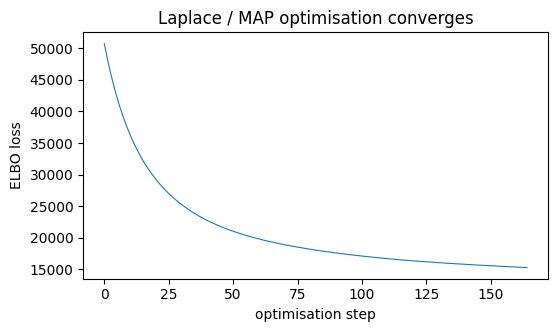
On inference. A latent GP field over many stations is a big correlated object, so we start with a Laplace approximation: optimise to the posterior mode (the MAP), then approximate the posterior by the Gaussian whose covariance is the curvature (inverse Hessian) at that mode. It costs a single optimisation — seconds — and is exact when the posterior is roughly Gaussian. We lead with it, read off the maps, and then check it honestly against a full NUTS run.
import sys
import pathlib
try:
import spatial_extremes # noqa: F401 installed editable in the project venv
except ModuleNotFoundError:
_here = pathlib.Path.cwd().resolve()
_roots = (_here, *_here.parents)
_cands = [r / "src" for r in _roots]
_cands += [r / "projects" / "spatial_extremes" / "src" for r in _roots]
_src = next((c for c in _cands if (c / "spatial_extremes").exists()), None)
if _src is None:
raise RuntimeError("cannot locate spatial_extremes/src") from None
sys.path.insert(0, str(_src))import jax
jax.config.update("jax_enable_x64", True)import time
import numpy as np
import jax
import jax.numpy as jnp
import jax.random as jr
import optax
import matplotlib.pyplot as plt
import numpyro
import numpyro.distributions as ndist
from numpyro.infer import SVI, Trace_ELBO, Predictive, MCMC, NUTS
from numpyro.infer.autoguide import AutoLaplaceApproximation
from numpyro.infer.initialization import init_to_median
from pyrox.gp import GPPrior, Matern, gp_sample
from xtremax import GeneralizedExtremeValueDistribution as GEV
from xtremax import gev_return_level
from spatial_extremes import data
from spatial_extremes.data import IBERIA_BBOX
from spatial_extremes.viz import iberia_axes, scatter_field
maxima, stations, years, is_real = data.load_annual_maxima(min_years=20)
Y = jnp.asarray(maxima) # (S, T) — NaN where a year is missing
mask = ~jnp.isnan(Y) # observed-entry mask for the likelihood
S, T = Y.shape
lon, lat = stations[:, 0], stations[:, 1]
Xs = jnp.asarray(stations)
Xm, Xsd = Xs.mean(0), Xs.std(0)
Xn = (Xs - Xm) / Xsd # standardised coords for the kernel
ybar = jnp.asarray(np.nanmean(maxima, axis=1)) # per-station mean (gap fill / prior)
Y_MEAN = float(np.nanmean(maxima))
LENGTHSCALE = 0.8 # fixed regional lengthscale (std units)
print("source:", "REAL" if is_real else "SYNTHETIC",
"| stations", S, "| years", f"{years.min()}-{years.max()}", f"({T})")
print(f"coverage: {int(np.asarray(mask.sum(1)).min())}-"
f"{int(np.asarray(mask.sum(1)).max())} yrs/station, "
f"{100 * float(mask.mean()):.0f}% of the {S}×{T} grid observed")/Users/eman/code_projects/research_notebook/projects/spatial_extremes/.venv/lib/python3.12/site-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
source: REAL | stations 107 | years 1897-2025 (125)
coverage: 23-120 yrs/station, 49% of the 107×125 grid observed
The model¶
The GP field is sampled in whitened coordinates ( with
and the Cholesky factor of the kernel matrix), which
turns the strongly-correlated field into independent standard-normal draws — far
easier for any sampler or optimiser. We centre to remove its additive
degeneracy with , keep the / bounded-ξ reparameterisation
from notebook 04, and give the nugget a non-centred form . The records are ragged (we keep stations with
years), so the likelihood masks missing station-years — only observed
entries enter the numpyro.factor.
def spatial_model(Xn, Y=None):
# smooth regional field f(s): Matérn-3/2, fixed lengthscale, learned amplitude
k = Matern(nu=1.5, init_lengthscale=LENGTHSCALE)
k.set_prior("variance", ndist.LogNormal(jnp.log(4.0), 0.5))
f = gp_sample("f", GPPrior(kernel=k, X=Xn), whitened=True)
f = f - jnp.mean(f) # fix f vs mu0 degeneracy
mu0 = numpyro.sample("mu0", ndist.Normal(Y_MEAN, 5.0))
tau_eps = numpyro.sample("tau_eps", ndist.HalfNormal(2.0)) # nugget scale
log_sigma = numpyro.sample("log_sigma", ndist.Normal(jnp.log(2.0), 0.4))
xi_t = numpyro.sample("xi_t", ndist.Normal(0.0, 0.5))
with numpyro.plate("stations", S):
z = numpyro.sample("z", ndist.Normal(0.0, 1.0)) # non-centred nugget
sigma = numpyro.deterministic("sigma", jnp.exp(log_sigma))
xi = numpyro.deterministic("xi", 0.5 * jnp.tanh(xi_t))
f_smooth = numpyro.deterministic("f_smooth", f) # regional component
mu_field = numpyro.deterministic("mu_field", mu0 + f + tau_eps * z)
if Y is not None:
# masked likelihood: only observed (non-NaN) station-years contribute
yf = jnp.where(mask, Y, ybar[:, None])
lp = GEV(loc=mu_field[:, None], scale=sigma,
concentration=xi).log_prob(yf)
numpyro.factor("y", jnp.where(mask, lp, 0.0).sum())Fit, fast — the Laplace approximation¶
AutoLaplaceApproximation optimises the model to its MAP and reads the Gaussian
posterior off the curvature there. We drive the optimisation with Adam (guarding
against the occasional out-of-support GEV gradient), and the ELBO loss curve
below should settle to a flat plateau — the sign it has found the mode.
guide = AutoLaplaceApproximation(spatial_model, init_loc_fn=init_to_median)
opt = numpyro.optim.optax_to_numpyro(
optax.chain(optax.zero_nans(), optax.clip_by_global_norm(10.0), optax.adam(3e-3))
)
svi = SVI(spatial_model, guide, opt, Trace_ELBO())
t0 = time.time()
res = svi.run(jr.PRNGKey(0), 4000, Xn, Y, progress_bar=False)
losses = np.asarray(res.losses)
finite = losses[np.isfinite(losses)]
print(f"Laplace fit in {time.time() - t0:.1f}s · final ELBO loss "
f"{float(finite[-1]):.1f}")
fig, ax = plt.subplots(figsize=(6, 3.2))
ax.plot(np.where(np.isfinite(losses), losses, np.nan), lw=0.8)
ax.set_xlabel("optimisation step")
ax.set_ylabel("ELBO loss")
ax.set_title("Laplace / MAP optimisation converges")
plt.show()Laplace fit in 6.6s · final ELBO loss 15290.2
Read off the posterior¶
We draw from the Laplace Gaussian with guide.sample_posterior, then push those
draws back through the model with Predictive to get posterior samples of every
derived quantity — the location field , the smooth component , and
the global .
lap = guide.sample_posterior(jr.PRNGKey(1), res.params, sample_shape=(600,))
pred = Predictive(spatial_model, posterior_samples=lap,
return_sites=["mu_field", "f_smooth", "sigma", "xi"])
draws = pred(jr.PRNGKey(2), Xn)
mu_field = np.asarray(draws["mu_field"]) # (n, S)
f_smooth = np.asarray(draws["f_smooth"]) # (n, S)
xi = np.asarray(draws["xi"]) # (n,)
sigma = np.asarray(draws["sigma"]) # (n,)
mu0_med = float(np.median(np.asarray(lap["mu0"])))
var_med = float(np.median(np.asarray(lap["Matern.variance"])))
print(f"global tail ξ = {xi.mean():+.3f} ± {xi.std():.3f}")
print(f"global scale σ = {sigma.mean():.2f} ± {sigma.std():.2f} °C")
print(f"GP amplitude √var = {np.sqrt(var_med):.2f} °C, fixed lengthscale = "
f"{LENGTHSCALE} (≈ {LENGTHSCALE * float(Xsd[0]):.1f}° lon)")
print(f"smooth field vs latitude: corr = "
f"{np.corrcoef(f_smooth.mean(0), lat)[0, 1]:+.2f}")global tail ξ = -0.206 ± 0.006
global scale σ = 1.96 ± 0.02 °C
GP amplitude √var = 2.38 °C, fixed lengthscale = 0.8 (≈ 2.3° lon)
smooth field vs latitude: corr = -0.80
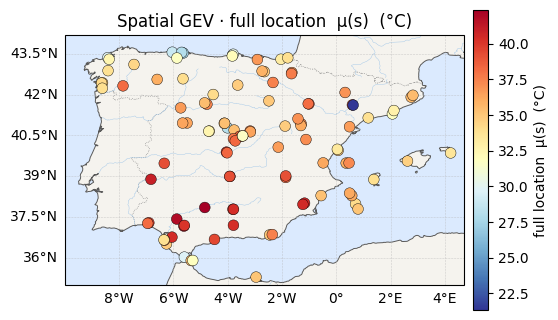
What the GP extracts: a regional field¶
The location splits into a smooth regional field — the part the GP can explain from position alone — and the per-station remainder. The smooth field tracks the north–south temperature gradient (its correlation with latitude is printed above): the GP has discovered the large-scale geography that the exchangeable hierarchical prior could not represent.
for vals, label, cmap in [
(mu0_med + f_smooth.mean(0), "smooth field μ₀ + f(s) (°C)", "RdYlBu_r"),
(mu_field.mean(0), "full location μ(s) (°C)", "RdYlBu_r"),
]:
ax = iberia_axes(figsize=(6.2, 5.2))
scatter_field(ax, lon, lat, vals, label=label, cmap=cmap)
ax.set_title(f"Spatial GEV · {label}")
plt.show()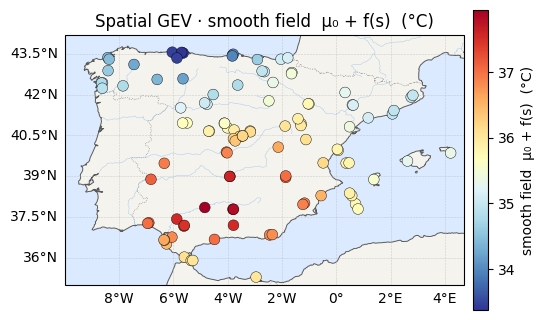
The GP’s superpower: a continuous surface with honest uncertainty¶
Neither the no-pooling nor the hierarchical model can say anything about a location without a station. A GP can: conditioning the fitted field on the stations gives a posterior over at every point on a grid — a continuous map, and an uncertainty that is small near stations and grows into the gaps. We interpolate the posterior-mean field onto a 60×60 grid over Iberia.
lon_min, lon_max, lat_min, lat_max = IBERIA_BBOX
glon = np.linspace(lon_min, lon_max, 60)
glat = np.linspace(lat_min, lat_max, 60)
GX, GY = np.meshgrid(glon, glat)
gridn = (jnp.asarray(np.stack([GX.ravel(), GY.ravel()], 1)) - Xm) / Xsd
k = Matern(nu=1.5, init_variance=var_med, init_lengthscale=LENGTHSCALE)
prior = GPPrior(kernel=k, X=Xn)
with numpyro.handlers.seed(rng_seed=0):
cond = prior.condition(jnp.asarray(f_smooth.mean(0)), jnp.array(1e-3))
gmean, gvar = cond.predict(gridn)
mu_grid = (np.asarray(gmean) + mu0_med).reshape(GX.shape)
std_grid = np.sqrt(np.asarray(gvar)).reshape(GX.shape)
fig, axes = plt.subplots(1, 2, figsize=(13, 5.2))
for ax, field, title, cmap in [
(axes[0], mu_grid, "interpolated location μ(s) (°C)", "RdYlBu_r"),
(axes[1], std_grid, "GP uncertainty: std (°C)", "magma_r"),
]:
pc = ax.pcolormesh(GX, GY, field, cmap=cmap, shading="auto")
ax.scatter(lon, lat, s=10, c="k", zorder=3)
ax.set_xlim(lon_min, lon_max); ax.set_ylim(lat_min, lat_max)
ax.set_aspect("equal"); ax.set_title(title)
ax.set_xlabel("longitude"); ax.set_ylabel("latitude")
fig.colorbar(pc, ax=ax, shrink=0.8, pad=0.02)
plt.show()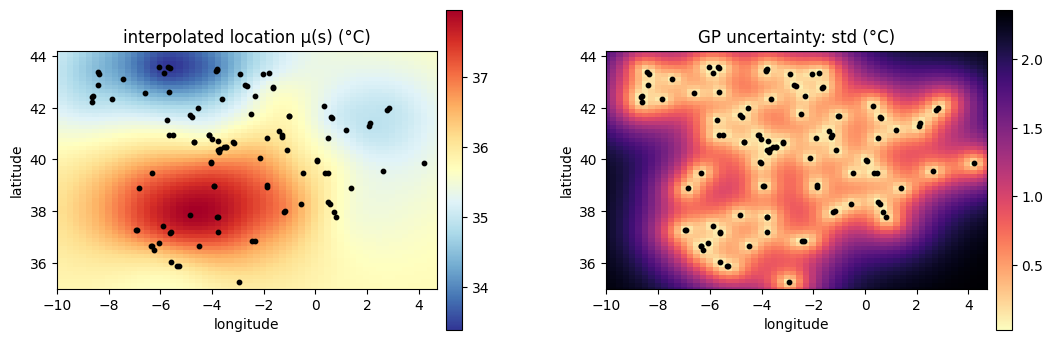
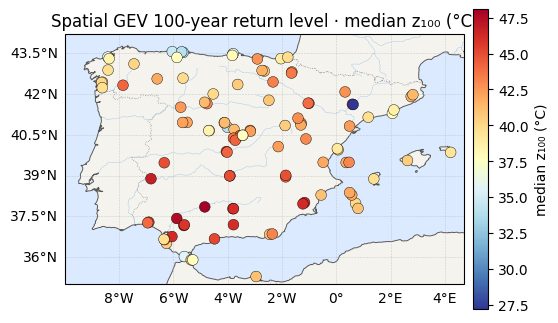
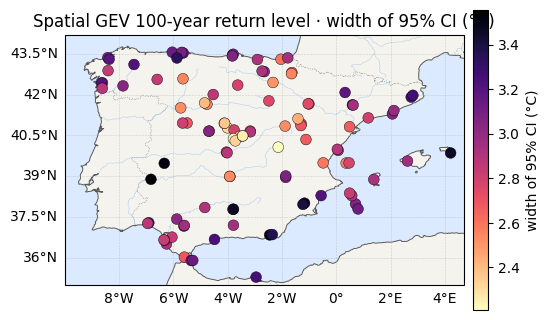
The payoff: 100-year return levels¶
The pooled, spatially-aware fit gives the 100-year level at every station with tight credible intervals — the location borrows strength from neighbours and the tail is shared. We print the average 95%-interval width below; for context, it was ≈ 7.8 °C with no pooling and ≈ 2.7 °C under the hierarchical model. (These are the Laplace intervals; the next section checks their width against NUTS, where there turns out to be a catch.)
RL = np.asarray(gev_return_level(
100.0, jnp.asarray(mu_field), jnp.asarray(sigma)[:, None],
jnp.asarray(xi)[:, None])) # (n, S)
rl_med = np.median(RL, 0)
rl_ciw = np.quantile(RL, 0.975, 0) - np.quantile(RL, 0.025, 0)
print(f"z100 median range : {rl_med.min():.1f} -> {rl_med.max():.1f} °C")
print(f"z100 95% CI width : {rl_ciw.mean():.1f} °C avg (max {rl_ciw.max():.1f})")
for vals, label, cmap in [(rl_med, "median z₁₀₀ (°C)", "RdYlBu_r"),
(rl_ciw, "width of 95% CI (°C)", "magma_r")]:
ax = iberia_axes(figsize=(6.2, 5.2))
scatter_field(ax, lon, lat, vals, label=label, cmap=cmap)
ax.set_title(f"Spatial GEV 100-year return level · {label}")
plt.show()z100 median range : 27.2 -> 48.1 °C
z100 95% CI width : 2.9 °C avg (max 3.6)
Takeaway¶
Making the pooling spatial was the right last move. The GP location field recovers the regional geography the exchangeable hierarchy ignored, gives a continuous map with uncertainty that honestly grows away from stations, and keeps the 100-year intervals tight — all from a Laplace fit in a few seconds.
One honest caveat travels with that speed: Laplace centres a Gaussian at the posterior mode, so its point estimates (the station maps, the global ξ) are trustworthy, but its calibrated interval widths are only as good as that Gaussian. The non-Gaussian geometry of a latent GP field plus a smooth/nugget ridge can make the mode-centred bands too wide or too narrow. The working rule: start fast with Laplace for the answer, and reach for full MCMC when the calibrated uncertainty is the thing you are selling.
Two further caveats, each a door to the capstones:
- We fixed the GP lengthscale to a regional scale. Left free, the data pull it much shorter — the location really does vary at fine, elevation-driven scales that cannot see, which is exactly why the nugget earns its place. Adding elevation as a covariate is the natural fix.
- We kept global. The capstones relax this — a spatial warming rate , then non-stationary , then a copula for joint exceedances across stations.