A Gaussian-process primer — and richer spatial features
From a lon/lat interpolator to an ARD GP that weighs elevation, distance-to-coast and slope
Abstract¶
A Gaussian process is a prior over smooth functions — the natural way to say the extreme-value parameters vary smoothly across space. We warm up by using a GP to interpolate each station’s mean annual maximum from its (lon, lat), with calibrated uncertainty. Then we ask what a station really “knows”: we derive physical covariates — elevation, distance to the coast and terrain slope — and let an ARD (automatic relevance determination) GP decide, through one lengthscale per feature, which of them actually drive the extremes.
A Gaussian-process primer (with pyrox)¶
A Gaussian process (GP) is a prior over smooth functions: nearby inputs get correlated outputs, with the correlation set by a kernel. It is the natural way to say “the extreme-value parameters vary smoothly across space”.
As a warm-up, forget extremes for a moment and just use a GP to interpolate a
spatial field: regress each station’s mean annual maximum onto its
(lon, lat), and predict a smooth surface with uncertainty. We use pyrox.gp:
a Matern kernel, a GPPrior, fit its hyperparameters by SVI, then condition
on the data and predict on a grid. Then we go beyond (lon, lat) and give
the GP physical features to work with.
import sys
import pathlib
try:
import spatial_extremes # noqa: F401 installed editable in the project venv
except ModuleNotFoundError:
_here = pathlib.Path.cwd().resolve()
_roots = (_here, *_here.parents)
_cands = [r / "src" for r in _roots]
_cands += [r / "projects" / "spatial_extremes" / "src" for r in _roots]
_src = next((c for c in _cands if (c / "spatial_extremes").exists()), None)
if _src is None:
raise RuntimeError("cannot locate spatial_extremes/src") from None
sys.path.insert(0, str(_src))import jax
jax.config.update("jax_enable_x64", True)import numpy as np
import jax.numpy as jnp
import jax.random as jr
import matplotlib.pyplot as plt
import numpyro
import numpyro.distributions as ndist
from numpyro.infer import SVI, Trace_ELBO, autoguide
from pyrox.gp import GPPrior, Matern, gp_factor
from spatial_extremes import data
from spatial_extremes.data import IBERIA_BBOX
maxima, stations, years, is_real = data.load_annual_maxima(min_years=20)
X = jnp.asarray(stations) # (S, 2) lon/lat
y = jnp.asarray(np.nanmean(maxima, 1)) # mean annual max per station
# standardise inputs and target for stable GP fitting
Xm, Xs = X.mean(0), X.std(0)
Xn = (X - Xm) / Xs
ym, ysd = float(y.mean()), float(y.std())
yn = (y - ym) / ysd
print("source:", "REAL" if is_real else "SYNTHETIC", "| stations", X.shape[0])/Users/eman/code_projects/research_notebook/projects/spatial_extremes/.venv/lib/python3.12/site-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
source: REAL | stations 107
def model(Xn, yn):
k = Matern(nu=1.5)
k.set_prior("variance", ndist.LogNormal(0.0, 1.0))
k.set_prior("lengthscale", ndist.LogNormal(0.0, 1.0))
noise = numpyro.sample("noise", ndist.LogNormal(np.log(0.2), 0.5))
gp_factor("obs", GPPrior(kernel=k, X=Xn), yn, noise)
guide = autoguide.AutoNormal(model)
svi = SVI(model, guide, numpyro.optim.Adam(2e-2), Trace_ELBO())
res = svi.run(jr.PRNGKey(0), 5000, Xn, yn, progress_bar=False)
def fitted(name):
key = next(k for k in res.params if name in k and k.endswith("_auto_loc"))
return float(jnp.exp(res.params[key]))
var_fit, ls_fit, noise_fit = fitted("variance"), fitted("lengthscale"), fitted("noise")
print(f"fitted kernel: variance={var_fit:.2f}, lengthscale={ls_fit:.2f}, "
f"noise={noise_fit:.2f}")fitted kernel: variance=0.85, lengthscale=0.91, noise=0.44
Condition the fitted GP on the stations and predict on a regular grid over Iberia. (We learn the observation noise: with it fixed too small the GP is forced to interpolate every station and the lengthscale collapses toward zero — a spiky, overfit surface. Learning it recovers an honest regional lengthscale.)
lon_min, lon_max, lat_min, lat_max = IBERIA_BBOX
glon = np.linspace(lon_min, lon_max, 60)
glat = np.linspace(lat_min, lat_max, 60)
GX, GY = np.meshgrid(glon, glat)
grid = np.stack([GX.ravel(), GY.ravel()], axis=1)
gridn = (jnp.asarray(grid) - Xm) / Xs
k = Matern(nu=1.5, init_variance=var_fit, init_lengthscale=ls_fit)
prior = GPPrior(kernel=k, X=Xn)
with numpyro.handlers.seed(rng_seed=0):
cond = prior.condition(yn, noise_fit)
mean, var = cond.predict(gridn)
mean_field = np.asarray(mean) * ysd + ym
std_field = np.sqrt(np.asarray(var)) * ysdfig, axes = plt.subplots(1, 2, figsize=(13, 5))
for ax, field, title, cmap in [
(axes[0], mean_field, "GP mean: mean annual max (°C)", "magma"),
(axes[1], std_field, "GP predictive std (°C)", "viridis"),
]:
pc = ax.pcolormesh(GX, GY, field.reshape(GX.shape), cmap=cmap, shading="auto")
ax.scatter(stations[:, 0], stations[:, 1], c="w", s=12, edgecolor="k", linewidth=0.4)
fig.colorbar(pc, ax=ax, shrink=0.8)
ax.set_title(title)
ax.set_xlabel("lon"); ax.set_ylabel("lat")
plt.show()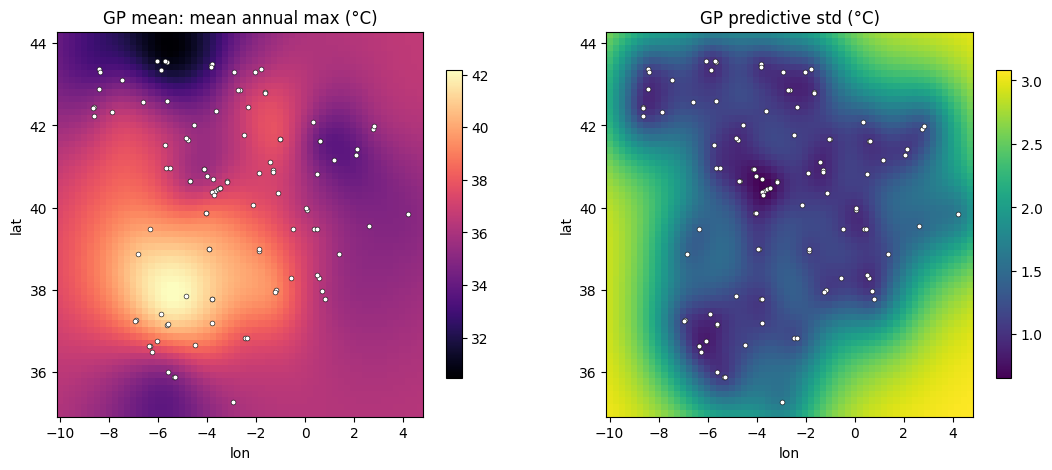
The GP gives a smooth interpolated surface and a calibrated uncertainty that
grows away from stations — all from just two inputs, (lon, lat). But a station
“knows” more than where it sits. The rest of the notebook hands the GP physical
covariates and lets it decide which ones matter.
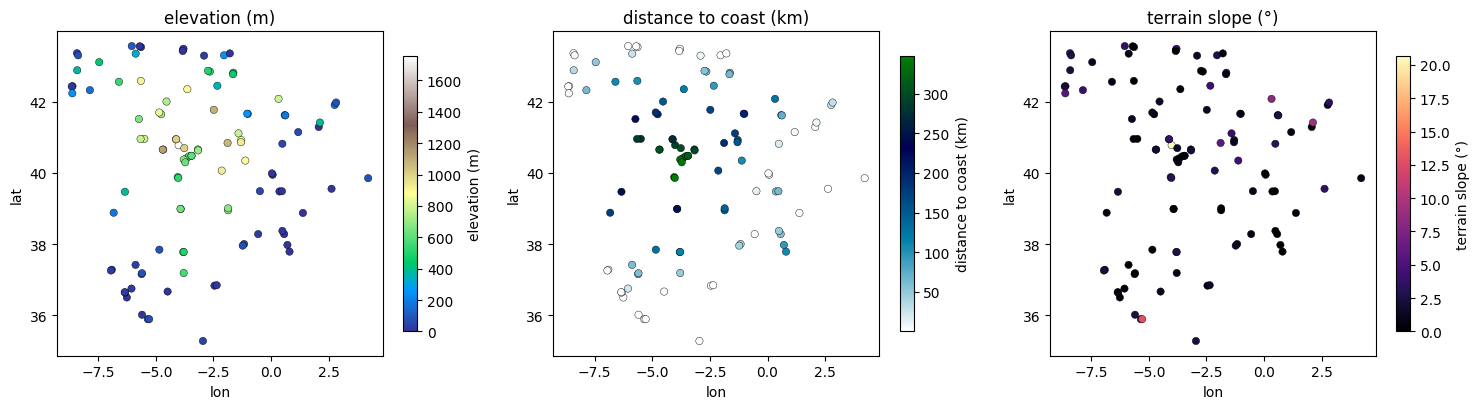
Beyond lon/lat: physical spatial features¶
Longitude and latitude are only proxies for what actually shapes a station’s summer extremes. Three physical covariates carry real signal:
- elevation — temperature falls with height (the lapse rate, ≈ 6.5 °C/km);
- distance to the coast — the sea moderates extremes, so inland stations run hotter and more variable;
- terrain slope — local relief, a proxy for sheltered valleys vs. exposed ground.
These are not in the CDS archive (which stores only lon/lat), so we derive
them once from public geodata — a DEM (OpenTopoData) for elevation and slope, the
Natural Earth coastline for distance — and cache a small table. The notebook only
reads that cache (scripts/build_features.py builds it), so rendering never
touches the network.
from spatial_extremes.features import load_station_features
feat = load_station_features(stations)
FEATURES = ["lon", "lat", "elevation", "dist_coast_km", "slope_deg"]
FLABELS = {
"lon": "longitude (°E)", "lat": "latitude (°N)",
"elevation": "elevation (m)", "dist_coast_km": "distance to coast (km)",
"slope_deg": "terrain slope (°)",
}
F = feat[FEATURES].to_numpy()
print("feature table:", F.shape)
print(feat[["elevation", "dist_coast_km", "slope_deg"]].describe().round(1).to_string())
# maps of the three derived features
fig, axes = plt.subplots(1, 3, figsize=(15, 4.2))
for ax, col, cmap in [
(axes[0], "elevation", "terrain"),
(axes[1], "dist_coast_km", "ocean_r"),
(axes[2], "slope_deg", "magma"),
]:
sc = ax.scatter(feat["lon"], feat["lat"], c=feat[col], cmap=cmap, s=28,
edgecolor="k", linewidth=0.3)
fig.colorbar(sc, ax=ax, shrink=0.85, label=FLABELS[col])
ax.set_title(FLABELS[col]); ax.set_xlabel("lon"); ax.set_ylabel("lat")
plt.tight_layout(); plt.show()
feature table: (107, 5)
elevation dist_coast_km slope_deg
count 107.0 107.0 107.0
mean 366.2 106.8 2.0
std 377.5 113.2 2.8
min 0.0 0.0 0.0
25% 26.5 3.3 0.4
50% 242.0 60.7 1.1
75% 648.5 183.5 2.6
max 1758.0 348.1 20.7
A quick look before modelling — the Pearson correlation of each feature with the per-station mean annual maximum. Some of these will surprise us, which is exactly why we let the GP weigh the features rather than guessing.
ybar_st = np.asarray(y)
print("corr(feature, mean annual max):")
for col in FEATURES:
r = np.corrcoef(feat[col].to_numpy(), ybar_st)[0, 1]
print(f" {FLABELS[col]:24s} r = {r:+.2f}")
corr(feature, mean annual max):
longitude (°E) r = -0.04
latitude (°N) r = -0.43
elevation (m) r = +0.03
distance to coast (km) r = +0.24
terrain slope (°) r = -0.25
The correlations hold a surprise: latitude carries the strongest signal (the north–south gradient), while raw elevation barely correlates with the mean annual maximum. That is confounding, not a non-effect — the lowest-elevation stations are a mix of cool, sea-moderated coastal sites and the hottest inland valleys, so elevation’s influence is masked marginally even though the highest mountains are plainly the coolest (the 1758 m station tops out near 29 °C). A multi-feature model is exactly what untangles this.
ARD: one lengthscale per feature¶
pyrox’s Matérn is isotropic — a single lengthscale shared by every input.
Automatic Relevance Determination (ARD) gives each input its own lengthscale:
a short lengthscale means the function changes quickly along that feature (it
matters), a long one means the GP barely uses it. We implement ARD by scaling
each standardised feature by a learnable per-dimension lengthscale and feeding the
result to the isotropic kernel — so the fitted scales themselves are the relevance
read-out. As above, we learn the noise: without it the GP overfits the noisiest
feature (slope) with a vanishing lengthscale and mis-reports its relevance.
# standardise the 5 features and fit a per-dimension (ARD) lengthscale to each
Fm, Fsd = F.mean(0), F.std(0)
Fn = (F - Fm) / Fsd
D = Fn.shape[1]
def ard_model(Fn, yn):
log_ell = numpyro.sample("log_ell", ndist.Normal(0.0, 1.0).expand([D]).to_event(1))
ell = jnp.exp(log_ell)
Xs = Fn / ell # per-dimension (ARD) scaling
k = Matern(nu=1.5, init_lengthscale=1.0) # isotropic on the scaled inputs
k.set_prior("variance", ndist.LogNormal(0.0, 1.0))
noise = numpyro.sample("noise", ndist.LogNormal(np.log(0.2), 0.5))
gp_factor("obs", GPPrior(kernel=k, X=Xs), yn, noise)
ard_guide = autoguide.AutoNormal(ard_model)
ard_svi = SVI(ard_model, ard_guide, numpyro.optim.Adam(2e-2), Trace_ELBO())
ard_res = ard_svi.run(jr.PRNGKey(0), 6000, jnp.asarray(Fn), yn, progress_bar=False)
def _fit(res, name):
key = next(k for k in res.params if name in k and k.endswith("_auto_loc"))
return np.exp(np.asarray(res.params[key]))
ell = _fit(ard_res, "log_ell")
var_ard = float(_fit(ard_res, "variance"))
noise_ard = float(_fit(ard_res, "noise"))
print("fitted ARD lengthscales (short = relevant):")
for name, l in zip(FEATURES, ell):
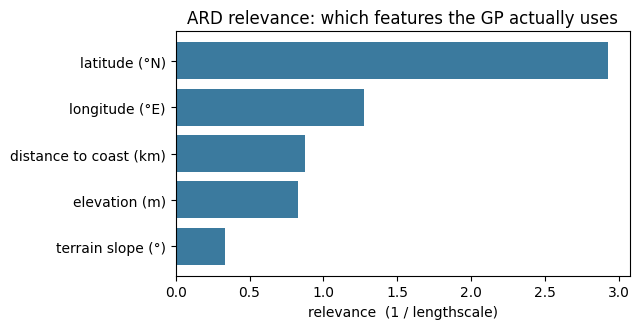
print(f" {FLABELS[name]:24s} ℓ = {l:5.2f} relevance 1/ℓ = {1 / l:4.2f}")fitted ARD lengthscales (short = relevant):
longitude (°E) ℓ = 0.78 relevance 1/ℓ = 1.27
latitude (°N) ℓ = 0.34 relevance 1/ℓ = 2.93
elevation (m) ℓ = 1.21 relevance 1/ℓ = 0.83
distance to coast (km) ℓ = 1.15 relevance 1/ℓ = 0.87
terrain slope (°) ℓ = 3.02 relevance 1/ℓ = 0.33
rel = 1.0 / ell
order = np.argsort(rel)
fig, ax = plt.subplots(figsize=(6.5, 3.4))
ax.barh([FLABELS[FEATURES[i]] for i in order], rel[order], color="#3b7a9e")
ax.set_xlabel("relevance (1 / lengthscale)")
ax.set_title("ARD relevance: which features the GP actually uses")
plt.tight_layout(); plt.show()
Does it predict better?¶
Relevance is suggestive; the honest test is out-of-sample accuracy. We compare
leave-one-out (LOO) RMSE of the plain (lon, lat) GP against the feature-rich ARD
GP, using the closed-form GP-LOO identity (no refitting):
.
def matern32(X1, X2, var, ls):
d2 = ((X1[:, None, :] - X2[None, :, :]) ** 2).sum(-1)
r = np.sqrt(np.clip(d2, 1e-30, None)) / ls
a = np.sqrt(3.0) * r
return var * (1 + a) * np.exp(-a)
def loo_rmse(Xs, var, ls, noise):
Xs = np.asarray(Xs)
K = matern32(Xs, Xs, var, ls) + float(noise) * np.eye(len(Xs))
Kinv = np.linalg.inv(K)
yv = np.asarray(yn)
mu_loo = yv - (Kinv @ yv) / np.diag(Kinv)
return float(np.sqrt(np.mean((yv - mu_loo) ** 2)) * ysd)
rmse_ll = loo_rmse(Xn, var_fit, ls_fit, noise_fit) # plain lon/lat GP
rmse_ard = loo_rmse(Fn / ell, var_ard, 1.0, noise_ard) # feature-rich ARD GP
print(f"LOO RMSE — lon/lat GP : {rmse_ll:.2f} °C")
print(f"LOO RMSE — ARD feature GP : {rmse_ard:.2f} °C")
print(f"=> features change LOO error by {100 * (1 - rmse_ard / rmse_ll):+.0f}%")LOO RMSE — lon/lat GP : 2.56 °C
LOO RMSE — ARD feature GP : 2.70 °C
=> features change LOO error by -6%
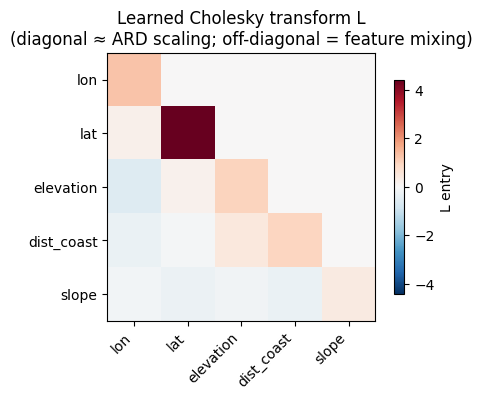
A fuller metric: the Cholesky transform¶
ARD scales each feature independently — a diagonal input transform, axis
aligned. The tinygp library offers a more
general option, transforms.Cholesky: a full lower-triangular linear map
applied to the inputs, so the kernel measures a Mahalanobis distance
. Off-diagonal entries let the GP rotate and mix
features (e.g. a “low and coastal” direction) rather than only rescale axes.
ARD is the special case where is diagonal.
pyrox has no transform API, but the idea is one line — feed the isotropic
Matérn the transformed inputs with a learned lower-triangular .
It has parameters instead of ARD’s ; the question is whether that
extra freedom helps or overfits on ~100 stations.
# tinygp-style Cholesky transform: a learned lower-triangular L (positive diagonal),
# generalising ARD's diagonal rescaling to a full Mahalanobis metric ‖L(x-x')‖.
n_off = D * (D - 1) // 2
def chol_model(Fn, yn):
log_diag = numpyro.sample("log_diag", ndist.Normal(0.0, 1.0).expand([D]).to_event(1))
off = numpyro.sample("offdiag", ndist.Normal(0.0, 1.0).expand([n_off]).to_event(1))
L = jnp.zeros((D, D)).at[jnp.arange(D), jnp.arange(D)].set(jnp.exp(log_diag))
L = L.at[jnp.tril_indices(D, -1)].set(off)
k = Matern(nu=1.5, init_lengthscale=1.0)
k.set_prior("variance", ndist.LogNormal(0.0, 1.0))
noise = numpyro.sample("noise", ndist.LogNormal(np.log(0.2), 0.5))
gp_factor("obs", GPPrior(kernel=k, X=Fn @ L.T), yn, noise)
chol_guide = autoguide.AutoNormal(chol_model)
chol_svi = SVI(chol_model, chol_guide, numpyro.optim.Adam(2e-2), Trace_ELBO())
chol_res = chol_svi.run(jr.PRNGKey(0), 8000, jnp.asarray(Fn), yn, progress_bar=False)
def _loc(res, name):
key = next(k for k in res.params if name in k and k.endswith("_auto_loc"))
return np.asarray(res.params[key])
L = np.zeros((D, D))
L[np.diag_indices(D)] = np.exp(_loc(chol_res, "log_diag"))
L[np.tril_indices(D, -1)] = _loc(chol_res, "offdiag")
var_chol = float(np.exp(_loc(chol_res, "variance")))
noise_chol = float(np.exp(_loc(chol_res, "noise")))
rmse_chol = loo_rmse(np.asarray(Fn) @ L.T, var_chol, 1.0, noise_chol)
print("leave-one-out RMSE, simplest to richest:")
print(f" lon/lat GP : {rmse_ll:.2f} °C (3 params)")
print(f" ARD diagonal metric: {rmse_ard:.2f} °C ({D + 2} params)")
print(f" Cholesky full metric: {rmse_chol:.2f} °C ({n_off + D + 2} params)")
short = [f.replace("_km", "").replace("_deg", "") for f in FEATURES]
fig, ax = plt.subplots(figsize=(4.8, 4.0))
m = np.abs(L).max()
im = ax.imshow(L, cmap="RdBu_r", vmin=-m, vmax=m)
ax.set_xticks(range(D)); ax.set_yticks(range(D))
ax.set_xticklabels(short, rotation=45, ha="right"); ax.set_yticklabels(short)
fig.colorbar(im, ax=ax, shrink=0.8, label="L entry")
ax.set_title("Learned Cholesky transform L\n(diagonal ≈ ARD scaling; off-diagonal = feature mixing)")
plt.tight_layout(); plt.show()
leave-one-out RMSE, simplest to richest:
lon/lat GP : 2.56 °C (3 params)
ARD diagonal metric: 2.70 °C (7 params)
Cholesky full metric: 2.74 °C (17 params)
Takeaway¶
Two (lon, lat) coordinates already interpolate the mean-annual-max field well,
and — the honest result — richer inputs do not beat them here. Leave-one-out
RMSE rises as we add flexibility:
| model | inputs | params | LOO RMSE |
|---|---|---|---|
(lon, lat) GP | 2 | 3 | 2.56 °C |
| ARD (diagonal metric) | 5 | 7 | 2.70 °C |
| Cholesky (full metric) | 5 | 17 | 2.74 °C |
With a dense network every held-out station has near neighbours, so coordinates already carry the smooth field; elevation and coastline are largely redundant with location for interpolation, and the Cholesky transform’s extra feature-mixing parameters only overfit ~100 stations. More capacity, no better generalisation — the bias–variance trade-off in one table.
What the features still buy is diagnosis and reach, not a lower interpolation error:
- ARD as a relevance read-out. The fitted lengthscales rank latitude first (the north–south gradient), longitude / distance-to-coast / elevation in the middle, and terrain slope last — the GP rightly distrusts a noisy, local feature once the observation noise is learned. (Fixed-noise fits invert this, overfitting slope with a vanishing lengthscale.)
- Extrapolation and covariates. Where stations are sparse a
(lon, lat)GP reverts to the prior mean, while elevation and coast distance still inform the field — which is why the spatial-GEV capstones can take them as covariates on rather than leaning on coordinates alone.
Next: instead of interpolating a precomputed summary, we put a GP inside the GEV model so the location parameter is a latent spatial field learned jointly with the tail — and these same covariates can drive it.