Every station on its own
Independent GEV fits, and why the map of extremes comes out noisy
Abstract¶
The simplest way to map extremes is to fit a GEV at every station independently — the no-pooling baseline. Done as one Bayesian fit per station in a single vectorised NUTS run on real Iberian stations, the location μ(s) comes out smooth and trustworthy, but the scale and especially the tail ξ(s) are dominated by sampling noise: a few decades of annual maxima cannot pin down a tail. Along the way the natural parameterisation makes NUTS diverge badly, and we document the two-line fix. A signal-to-noise diagnostic and the 100-year return level show why independent fitting is wasteful — and motivate pooling.
The foundations notebooks fitted one Bayesian GEV to one station. A block maximum — here an annual-maximum daily temperature — follows the Generalized Extreme Value law
with a location μ (where the distribution sits), a scale σ (how spread out it is) and a shape ξ (the tail: gives a bounded upper tail, the light Gumbel tail, a heavy tail). The notation encodes the support constraint — a hard edge in the density that will matter a great deal below.
To get a map of extremes across Iberia, the obvious move is to repeat that fit at every station, independently — the no-pooling baseline, and the subject of this notebook:
with no parameter shared between stations. Because the priors are fixed (not a shared hyper-prior), the posteriors factorise, so we can fit all of them in a single vectorised NUTS run instead of separate ones — the same independent answer, a few seconds of compute.
The result motivates everything that follows. The location comes out smooth and geographic, but the scale and especially the tail come out noisy: each is inferred from only a few decades of annual maxima — fewer still at the short-record stations — so neighbouring stations land on very different tails purely from sampling variability. We make that statement quantitative below — and borrowing strength across space (the next notebooks) is what fixes it.
Along the way we hit, and document, a real modelling snag: the natural parameterisation makes NUTS diverge badly, and a two-line reparameterisation cures it. That detour is not incidental — the same ill-conditioning is a symptom of the too-little-data-per-station problem that pooling exists to solve.
import sys
import pathlib
try:
import spatial_extremes # noqa: F401 installed editable in the project venv
except ModuleNotFoundError:
_here = pathlib.Path.cwd().resolve()
_roots = (_here, *_here.parents)
_cands = [r / "src" for r in _roots]
_cands += [r / "projects" / "spatial_extremes" / "src" for r in _roots]
_src = next((c for c in _cands if (c / "spatial_extremes").exists()), None)
if _src is None:
raise RuntimeError("cannot locate spatial_extremes/src") from None
sys.path.insert(0, str(_src))import jax
jax.config.update("jax_enable_x64", True)import time
import numpy as np
import jax
import jax.numpy as jnp
import jax.random as jr
import matplotlib.pyplot as plt
import numpyro
import numpyro.distributions as ndist
from numpyro.infer import MCMC, NUTS
from numpyro.infer.initialization import init_to_median
from xtremax import GeneralizedExtremeValueDistribution as GEV
from spatial_extremes import data
from spatial_extremes.viz import iberia_axes, scatter_field
# Keep every station with >= 20 years of record (not just the fully-covered
# ones): far more stations, but ragged series with NaN gaps to mask.
maxima, stations, years, is_real = data.load_annual_maxima(min_years=20)
Y = jnp.asarray(maxima) # (S, T) — NaN where a station-year is missing
mask = ~jnp.isnan(Y) # True where the annual maximum was observed
lon, lat = stations[:, 0], stations[:, 1]
S, T = Y.shape
ybar = jnp.asarray(np.nanmean(maxima, axis=1)) # per-station mean (observed yrs)
ystd = jnp.asarray(np.nanstd(maxima, axis=1)) # per-station spread (observed yrs)
n_obs = np.asarray(mask.sum(1)) # years observed per station
print("source:", "REAL" if is_real else "SYNTHETIC",
"| stations", S, "| years", f"{years.min()}-{years.max()}", f"({T})")
print(f"coverage: {int(n_obs.min())}-{int(n_obs.max())} yrs/station, "
f"{100 * float(mask.mean()):.0f}% of the {S}×{T} grid observed")source: REAL | stations 107 | years 1897-2025 (125)
coverage: 23-120 yrs/station, 49% of the 107×125 grid observed
Before any modelling, the raw network: every station coloured by its mean annual-maximum temperature, on a meteorological blue→red scale. There is obvious large-scale structure — warm south and east, cool interior and north — exactly the spatial smoothness the no-pooling fit will fail to exploit.
ax = iberia_axes(figsize=(6.4, 5.4))
scatter_field(ax, lon, lat, np.nanmean(maxima, 1), label="mean annual max (°C)",
cmap="RdYlBu_r")
ax.set_title(f"{S} stations · mean annual-maximum temperature")
plt.show()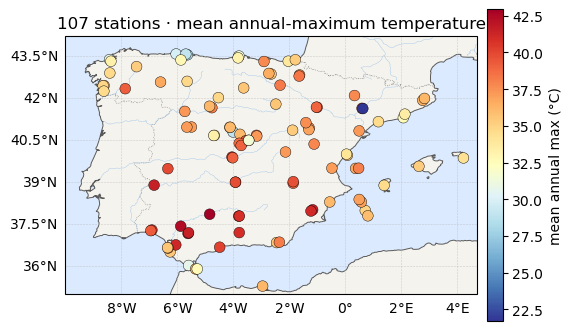
One GEV per station — the natural model¶
The model is the single-station GEV from notebook 02, wrapped in a
numpyro.plate over stations so each station draws its own
. The natural, textbook priors are
weakly-informative and fixed per station:
where and are station ’s own sample mean and standard deviation, and the prior shrinks gently toward the light-tailed . There is no parameter shared across stations, so this is genuine no-pooling: the joint posterior is a product of independent single-station posteriors, and running them in one NUTS pass is just bookkeeping.
Because we kept stations with as few as 20 years, the grid is
ragged — many station-years are missing. We handle that the Bayesian way:
the likelihood sums only over the observed entries (a
boolean mask) via numpyro.factor, so missing years contribute nothing
rather than biasing the fit.
Let us fit exactly this — and watch what happens.
def gev_naive(Y):
S, T = Y.shape
with numpyro.plate("stations", S):
mu = numpyro.sample("mu", ndist.Normal(ybar, 5.0))
sigma = numpyro.sample("sigma", ndist.HalfNormal(ystd))
xi = numpyro.sample("xi", ndist.Normal(0.0, 0.25))
# masked likelihood: only observed (non-NaN) station-years contribute
yf = jnp.where(mask, Y, ybar[:, None])
lp = GEV(loc=mu[:, None], scale=sigma[:, None],
concentration=xi[:, None]).log_prob(yf)
numpyro.factor("obs", jnp.where(mask, lp, 0.0).sum())
mcmc_naive = MCMC(NUTS(gev_naive, init_strategy=init_to_median),
num_warmup=1000, num_samples=1000, num_chains=1,
progress_bar=False)
t0 = time.time()
mcmc_naive.run(jr.PRNGKey(0), Y, extra_fields=("diverging",))
div_naive = int(mcmc_naive.get_extra_fields()["diverging"].sum())
print(f"NAIVE model: {div_naive} / 1000 draws diverged "
f"({100 * div_naive / 1000:.0f}%) · {time.time() - t0:.1f}s")
print("=> a diagnostic five-alarm fire: most draws are untrustworthy.")NAIVE model: 443 / 1000 draws diverged (44%) · 162.2s
=> a diagnostic five-alarm fire: most draws are untrustworthy.
Why it diverges — and the fix¶
A NUTS divergence flags a draw where the leapfrog integrator hit a region too sharply curved to follow; those draws are discarded as unreliable, and hundreds of them means the posterior is not to be trusted. Three features of the naive model conspire to produce them:
- The GEV support edge. The log-density’s gradient blows up as . When a leapfrog step nudges so that an observed approaches that edge, the trajectory diverges. Stations with a short, bounded upper tail () sit near their own edge and are the worst offenders.
- The wall.
HalfNormalplaces a hard reflecting boundary at that the sampler must keep turning around at. - Compounding. All stations share one Hamiltonian trajectory, so a single misbehaving station flags the whole draw divergent. With dozens of stations even a small per-station failure rate snowballs.
Two changes cure it without changing the statistical model in any material way:
- Sample . Then is positive by construction and the 0-wall disappears: .
- Bound the shape smoothly: with . Near zero this is the prior from the foundations (because and ), but it confines to — the range where the GEV has a finite mean and the trajectory can never fall off the support edge.
Nudging NUTS’s target_accept_prob up to 0.99 shortens the leapfrog steps for
good measure. Each fix removes roughly an order of magnitude of divergences —
the exact counts depend on the station set, so the fit below prints its own:
| parameterisation | target_accept | divergences |
|---|---|---|
naive (HalfNormal σ, ξ) | 0.80 | majority of draws |
| naive | 0.95 | ~a third |
| + bounded ξ | 0.95 | ~one in ten |
| + bounded ξ | 0.99 | a few percent ✓ |
The residual divergences cluster at the genuinely short-tailed, short-record stations — the very ones whose tails are hardest to pin down from a couple dozen numbers, and which pooling will later regularise.
def gev_no_pool(Y):
S, T = Y.shape
with numpyro.plate("stations", S):
mu = numpyro.sample("mu", ndist.Normal(ybar, 5.0))
log_sigma = numpyro.sample("log_sigma",
ndist.Normal(jnp.log(ystd), 0.5))
xi_t = numpyro.sample("xi_t", ndist.Normal(0.0, 0.5))
sigma = numpyro.deterministic("sigma", jnp.exp(log_sigma))
xi = numpyro.deterministic("xi", 0.5 * jnp.tanh(xi_t))
# masked likelihood: only observed (non-NaN) station-years contribute
yf = jnp.where(mask, Y, ybar[:, None])
lp = GEV(loc=mu[:, None], scale=sigma[:, None],
concentration=xi[:, None]).log_prob(yf)
numpyro.factor("obs", jnp.where(mask, lp, 0.0).sum())
mcmc = MCMC(NUTS(gev_no_pool, init_strategy=init_to_median,
target_accept_prob=0.99),
num_warmup=2000, num_samples=1000, num_chains=1, progress_bar=False)
t0 = time.time()
mcmc.run(jr.PRNGKey(0), Y, extra_fields=("diverging",))
post = mcmc.get_samples() # each entry: (n_draws, S)
n_div = int(mcmc.get_extra_fields()["diverging"].sum())
print(f"FIXED model: fit {S} stations in one NUTS run · "
f"{time.time() - t0:.1f}s · {n_div} divergences "
f"({100 * n_div / 1000:.1f}%)")
# posterior median + 95% credible interval per station, per parameter
def summarise(name):
a = post[name]
return (np.asarray(jnp.median(a, 0)),
np.asarray(jnp.quantile(a, 0.025, 0)),
np.asarray(jnp.quantile(a, 0.975, 0)))
mu_med, mu_lo, mu_hi = summarise("mu")
sig_med, sig_lo, sig_hi = summarise("sigma")
xi_med, xi_lo, xi_hi = summarise("xi")
print("μ median range:", mu_med.round(1).min(), "->", mu_med.round(1).max(), "°C")
print("σ median range:", sig_med.round(2).min(), "->", sig_med.round(2).max(), "°C")
print("ξ median range:", xi_med.round(2).min(), "->", xi_med.round(2).max())FIXED model: fit 107 stations in one NUTS run · 401.3s · 21 divergences (2.1%)
μ median range: 21.3 -> 42.3 °C
σ median range: 0.93 -> 4.34 °C
ξ median range: -0.42 -> 0.24
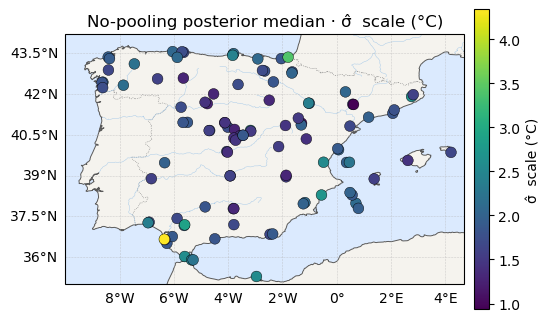
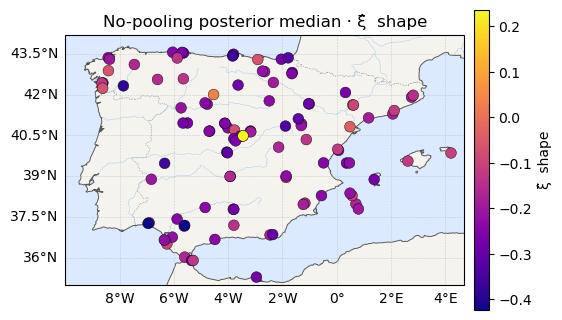
The maps¶
Posterior-median μ, σ, ξ across the network — location on the same
temperature scale as above, scale on viridis, shape on plasma. Watch how the
eye reads them: μ looks like a map, ξ looks like static.
for vals, label, cmap in [(mu_med, "μ̂ location (°C)", "RdYlBu_r"),
(sig_med, "σ̂ scale (°C)", "viridis"),
(xi_med, "ξ̂ shape", "plasma")]:
ax = iberia_axes(figsize=(6.2, 5.2))
scatter_field(ax, lon, lat, vals, label=label, cmap=cmap)
ax.set_title(f"No-pooling posterior median · {label}")
plt.show()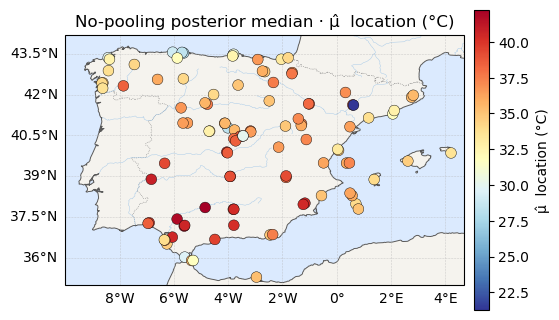
Is the map real, or is it noise?¶
“Looks like static” is not an argument. Here is one. For each parameter form a signal-to-noise ratio
the numerator being the spread of the point estimates across stations (how much the map appears to vary) and the denominator the typical within-station posterior uncertainty (how unsure each single estimate is).
- — real geographic variation exceeds per-station uncertainty; the map is trustworthy.
- — the apparent variation is smaller than the error bars; the map is mostly sampling noise dressed up as geography.
rows = []
for name, (med, lo, hi) in [("μ", (mu_med, mu_lo, mu_hi)),
("σ", (sig_med, sig_lo, sig_hi)),
("ξ", (xi_med, xi_lo, xi_hi))]:
signal = med.std()
noise = (hi - lo).mean()
rows.append((name, signal, noise, signal / noise))
print(f"{name}: signal SD(med)={signal:6.3f} noise mean-CI-width={noise:6.3f}"
f" ratio={signal / noise:5.2f}")
fig, ax = plt.subplots(figsize=(5.4, 3.6))
names = [r[0] for r in rows]
ratios = [r[3] for r in rows]
bars = ax.bar(names, ratios, color=["#2a9d8f", "#e9c46a", "#e76f51"])
ax.axhline(1.0, ls="--", color="0.4")
ax.text(2.35, 1.04, "signal = noise", color="0.4", ha="right", fontsize=9)
ax.set_ylabel("signal / noise = SD(median) / mean CI width")
ax.set_title("Only μ rises above the noise floor")
for b, r in zip(bars, ratios):
ax.text(b.get_x() + b.get_width() / 2, r + 0.03, f"{r:.2f}", ha="center")
plt.show()μ: signal SD(med)= 3.405 noise mean-CI-width= 1.056 ratio= 3.22
σ: signal SD(med)= 0.462 noise mean-CI-width= 0.720 ratio= 0.64
ξ: signal SD(med)= 0.098 noise mean-CI-width= 0.318 ratio= 0.31
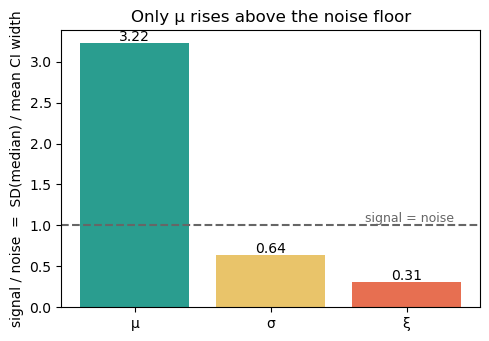
The bars say it cleanly: μ sits at roughly twice the noise floor (its map is real), while ξ sits near one-fifth of it — its map is four-fifths sampling noise.
The forest plots below make the same point one station at a time. Each marker is a station’s posterior median with its 95% credible interval, stations sorted by median. For μ the intervals are tight and the stations clearly separate — they really do differ. For ξ almost every interval straddles the dashed across-network mean: the tails are statistically indistinguishable, yet the medians alone (the coloured map above) invited us to believe in sharp local differences.
fig, axes = plt.subplots(1, 2, figsize=(12, 4.6))
for ax, (med, lo, hi, label, color) in zip(
axes,
[(mu_med, mu_lo, mu_hi, "μ location (°C)", "#6a4c93"),
(xi_med, xi_lo, xi_hi, "ξ shape", "#e76f51")],
):
order = np.argsort(med)
x = np.arange(med.size)
ax.errorbar(x, med[order], yerr=[med[order] - lo[order], hi[order] - med[order]],
fmt="o", ms=3, lw=0.6, color=color, ecolor=color, alpha=0.7)
ax.axhline(med.mean(), ls="--", color="0.4", label="across-network mean")
ax.set_xlabel("station (sorted by posterior median)")
ax.set_ylabel(label)
ax.legend(loc="upper left", fontsize=9)
axes[0].set_title("μ: intervals tight, stations separate → real structure")
axes[1].set_title("ξ: intervals overlap the mean → mostly noise")
plt.show()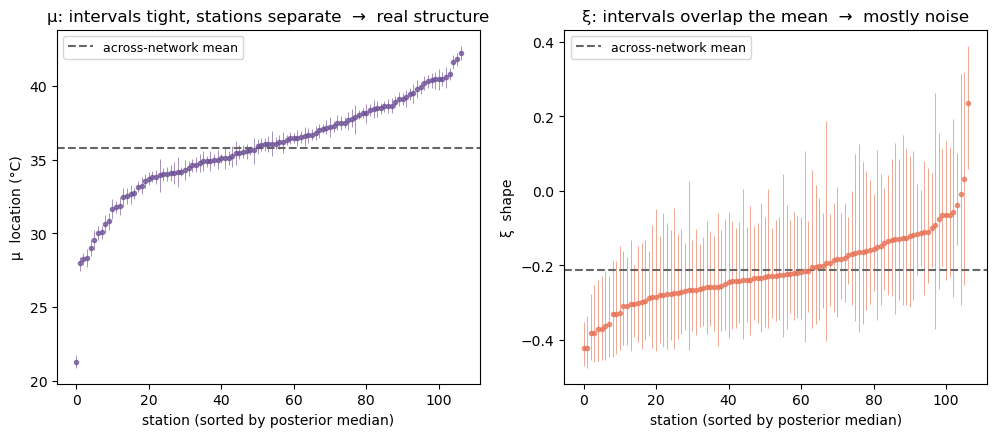
What a planner actually sees¶
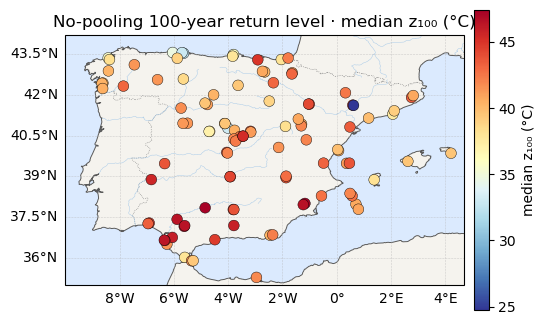
Decision-makers do not ask for ξ; they ask for the -year return level (notebook 03) — the value exceeded on average once every years, a high quantile of the fitted GEV:
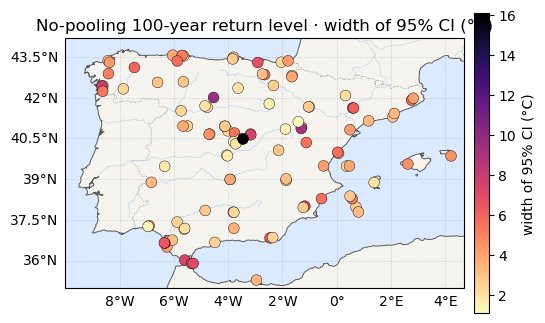
The noisy tails propagate straight into it. Below: the posterior-median map, and beside it the width of each station’s 95% credible interval — the honest error bar a no-pooling fit attaches to its own answer.
RL = GEV(loc=post["mu"], scale=post["sigma"],
concentration=post["xi"]).return_level(100.0) # (n_draws, S)
rl_med = np.asarray(jnp.median(RL, 0))
rl_ciw = np.asarray(jnp.quantile(RL, 0.975, 0) - jnp.quantile(RL, 0.025, 0))
print(f"z100 median range: {rl_med.min():.1f} -> {rl_med.max():.1f} °C")
print(f"z100 95% CI width: {rl_ciw.mean():.1f} °C on average "
f"(up to {rl_ciw.max():.1f} °C at the worst station)")
for vals, label, cmap in [(rl_med, "median z₁₀₀ (°C)", "RdYlBu_r"),
(rl_ciw, "width of 95% CI (°C)", "magma_r")]:
ax = iberia_axes(figsize=(6.2, 5.2))
scatter_field(ax, lon, lat, vals, label=label, cmap=cmap)
ax.set_title(f"No-pooling 100-year return level · {label}")
plt.show()z100 median range: 24.7 -> 47.4 °C
z100 95% CI width: 3.9 °C on average (up to 16.1 °C at the worst station)
Takeaway¶
Fitting each station on its own is honest but wasteful. It throws away the one thing the station map made obvious — that extremes vary smoothly in space — and pays for it twice: with tails (ξ, and therefore ) dominated by sampling noise, and with a posterior geometry so ill-conditioned it needed careful reparameterising just to sample. The signal-to-noise bars quantify the damage: only μ survives.
Both problems have the same root — too few observations per station — and the same cure: stop treating the stations as unrelated problems and let them share information. Next: a hierarchical Bayesian model that puts a common prior over the per-station parameters, so every station’s tail is pulled toward the group and the noise shrinks — partial pooling, the middle ground between no pooling (here) and the spatial field to come.