FFJORD — continuous-time Gaussianization
The infinite-depth limit of a Gaussianization stack: a learned ODE whose flow carries the data distribution to N(0, I), with the log-density as a line integral of the trace
00 — FFJORD: continuous-time Gaussianization¶
Every Gaussianization flow so far has been a finite stack: rotate, Gaussianize the margins, repeat times (Part 3), or stack coupling blocks and train end to end (Parts 4-5). Each block contributes an additive to the change-of-variables ledger. Now send the number of blocks to infinity and the per-block step to zero. The discrete composition becomes an ordinary differential equation
and the stack of bijectors becomes the flow map of a single learned vector field — a continuous normalizing flow (CNF; Chen et al. 2018, FFJORD Grathwohl et al. (2019), Kidger (2021), Winkler et al. (2019)). The payoff is the instantaneous change of variables: where a discrete layer adds a log-determinant, the continuous flow integrates the trace of the Jacobian,
Two things follow. First, needs no architectural invertibility constraint — any smooth network will do, because the ODE flow is invertible by construction (run time backwards). Second, the log-det is a trace, not a determinant: cheap to evaluate exactly in low dimension and cheap to estimate in high dimension (notebook 01).
We follow the FlowJax convention where the base distribution is :
the flow’s forward map (transform) integrates and carries latent
data (generation), and its inverse integrates and carries data
latent — the Gaussianization direction.
What you will see
- A
gf.FFJORDbijection with a smallgf.DiffeqMLPvector field, trained by NLL. - The learned density and samples on two moons.
- The Gaussianization check: push the data through the inverse flow and confirm the pushforward is (scatter, per-axis QQ, skew/kurtosis) — the Part 0 diagnostics, now on a continuous flow.
- The transport: the vector field at three times, and data trajectories flowing onto the standard Gaussian.
import warnings
warnings.filterwarnings("ignore")
import diffrax
import equinox as eqx
import jax
import jax.numpy as jnp
import jax.random as jr
import matplotlib.pyplot as plt
import numpy as np
import optax
from flowjax.distributions import Normal, Transformed
from flowjax.train import fit_to_data
from scipy import stats
from sklearn.datasets import make_moons
import gauss_flows as gf
from _style import DATA_COLOR, GAUSS_KW, LATENT_COLOR, SCATTER_KW, style_ax
jax.config.update("jax_enable_x64", True)1. Data¶
A standardised two-moons sample — the same toy used for the diagonal and coupling flows of Parts 4-5, so the comparison is honest. Standardisation matters here because the base distribution is a unit-variance Gaussian: without it the vector field would have to spend capacity undoing the scale.
n_samples = 1500
X_raw, _ = make_moons(n_samples=n_samples, noise=0.06, random_state=0)
X = (X_raw - X_raw.mean(0)) / X_raw.std(0)
X = jnp.asarray(X)
fig, ax = plt.subplots(figsize=(5.2, 5))
ax.scatter(np.asarray(X[:, 0]), np.asarray(X[:, 1]), color=DATA_COLOR, **SCATTER_KW)
ax.set(title="Two moons (standardised)", xlabel="$x_1$", ylabel="$x_2$")
ax.set_aspect("equal")
style_ax(ax)
fig.tight_layout()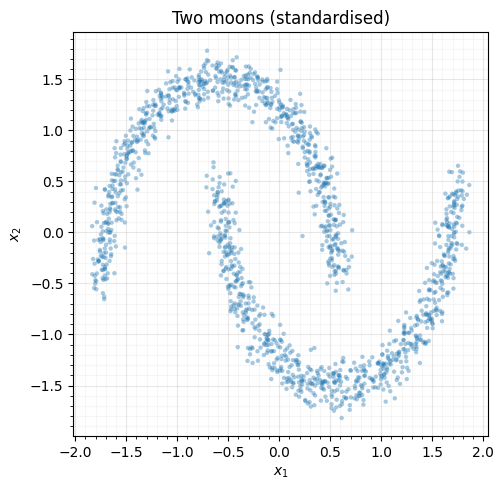
2. Build a FFJORD bijection¶
The vector field is a small gf.DiffeqMLP mapping ; the
gf.FFJORD bijection wraps it and hands the augmented dynamics
to diffrax. The flow is unconditional
(control_dim=0), so cond_shape is None and no condition is needed.
In 2-D the exact trace is essentially free — two Jacobian-vector products per
ODE step — so we use divergence_mode="exact" for a variance-free log-det.
(Notebook 01 is where the stochastic Hutchinson
estimator earns its keep, as grows.)
key = jr.key(0)
vf_key, ffjord_key, train_key, sample_key = jr.split(key, 4)
vector_field = gf.DiffeqMLP(vf_key, in_dim=2, control_dim=0, hidden=(64, 64))
ffjord = gf.FFJORD(
ffjord_key,
shape=(2,),
vector_field=vector_field,
control_dim=0,
divergence_mode="exact",
solver="tsit5",
adjoint="recursive_checkpoint",
rtol=1e-4,
atol=1e-4,
)
dist = Transformed(Normal(jnp.zeros(2)), ffjord)
n_params = sum(
int(np.prod(p.shape))
for p in jax.tree_util.tree_leaves(eqx.filter(vector_field, eqx.is_array))
)
print("unconditional FFJORD on shape (2,)")
print(" vector field : DiffeqMLP, hidden=(64, 64)")
print(f" trainable parameters: {n_params}")
print(" divergence mode : exact (2 JVPs / ODE step in 2-D)")
print(f" cond_shape : {ffjord.cond_shape}")unconditional FFJORD on shape (2,)
vector field : DiffeqMLP, hidden=(64, 64)
trainable parameters: 4546
divergence mode : exact (2 JVPs / ODE step in 2-D)
cond_shape : None
3. Train by maximum likelihood¶
fit_to_data minimises the negative log-likelihood
under the flow. Each gradient step solves a
vmapped ODE over the batch, so FFJORD is far slower per step than the closed-form
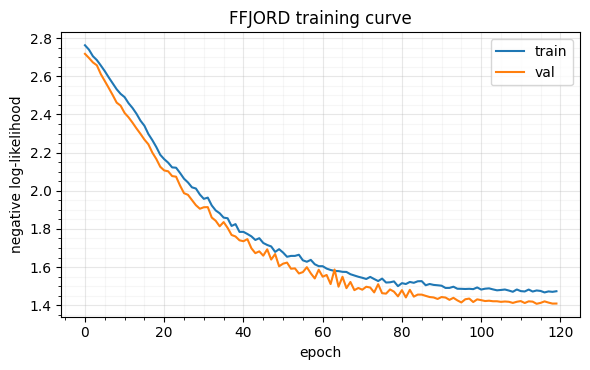
flows of Parts 4-5 — this is the slowest cell in the notebook. We cap it at ~120
epochs and use a cosine learning-rate decay () so the
fit settles inside that budget rather than crawling; early stopping on a validation
split halts sooner if the held-out NLL plateaus, and gradient clipping guards
against the occasional stiff ODE blowing up a gradient.
n_epochs, batch_size, val_prop = 120, 256, 0.1
steps_per_epoch = -(-int(X.shape[0] * (1 - val_prop)) // batch_size) # ceil
lr = optax.cosine_decay_schedule(2e-3, decay_steps=n_epochs * steps_per_epoch, alpha=0.02)
optimizer = optax.chain(
optax.clip_by_global_norm(5.0),
optax.adam(lr),
)
trained_dist, losses = fit_to_data(
train_key,
dist,
X,
optimizer=optimizer,
max_epochs=n_epochs,
max_patience=20,
batch_size=batch_size,
val_prop=val_prop,
show_progress=False,
)
print(f"stopped after {len(losses['train'])} epochs "
f"(best val NLL = {float(min(losses['val'])):.4f})")
trained_ffjord = trained_dist.bijection
fig, ax = plt.subplots(figsize=(6, 3.8))
ep = jnp.arange(len(losses["train"]))
ax.plot(ep, losses["train"], color=DATA_COLOR, label="train")
ax.plot(ep, losses["val"], color=LATENT_COLOR, label="val")
ax.set(xlabel="epoch", ylabel="negative log-likelihood", title="FFJORD training curve")
ax.legend()
style_ax(ax)
fig.tight_layout()stopped after 120 epochs (best val NLL = 1.4072)
4. Density and samples¶
For clean plots we re-instantiate the flow with the same trained vector field
but a tighter solver and the direct adjoint (more accurate at eval time, when we
don’t need backward gradients). The density on the left is on a grid;
the right overlays fresh flow samples on the data.
exact_ffjord = gf.FFJORD(
jr.key(99), # trace_key unused in exact mode
shape=(2,),
vector_field=trained_ffjord.vector_field,
control_dim=0,
divergence_mode="exact",
solver="tsit5",
adjoint="direct",
rtol=1e-6,
atol=1e-6,
)
exact_dist = Transformed(Normal(jnp.zeros(2)), exact_ffjord)
lim, grid_n = 2.6, 70
xs = jnp.linspace(-lim, lim, grid_n)
gx, gy = jnp.meshgrid(xs, xs)
grid = jnp.stack([gx.ravel(), gy.ravel()], -1)
@eqx.filter_jit
def grid_log_prob(pts):
return jax.vmap(exact_dist.log_prob)(pts)
density = jnp.exp(grid_log_prob(grid)).reshape(grid_n, grid_n)
samples = trained_dist.sample(sample_key, (n_samples,))
fig, (ax_d, ax_s) = plt.subplots(1, 2, figsize=(11.5, 5))
m = ax_d.contourf(np.asarray(gx), np.asarray(gy), np.asarray(density), levels=20, cmap="viridis")
ax_d.set(title=r"learned density $p_\theta(x)$", xlabel="$x_1$", ylabel="$x_2$")
ax_d.set_aspect("equal")
fig.colorbar(m, ax=ax_d, fraction=0.046)
style_ax(ax_d)
ax_s.scatter(np.asarray(X[:, 0]), np.asarray(X[:, 1]), color=DATA_COLOR, label="data", **SCATTER_KW)
ax_s.scatter(np.asarray(samples[:, 0]), np.asarray(samples[:, 1]), color="tab:red",
marker="x", s=10, alpha=0.4, linewidths=0.7, label="flow samples")
ax_s.set(title="data vs. flow samples", xlabel="$x_1$", ylabel="$x_2$",
xlim=(-lim, lim), ylim=(-lim, lim))
ax_s.set_aspect("equal")
ax_s.legend(loc="upper right", framealpha=0.9)
style_ax(ax_s)
fig.tight_layout()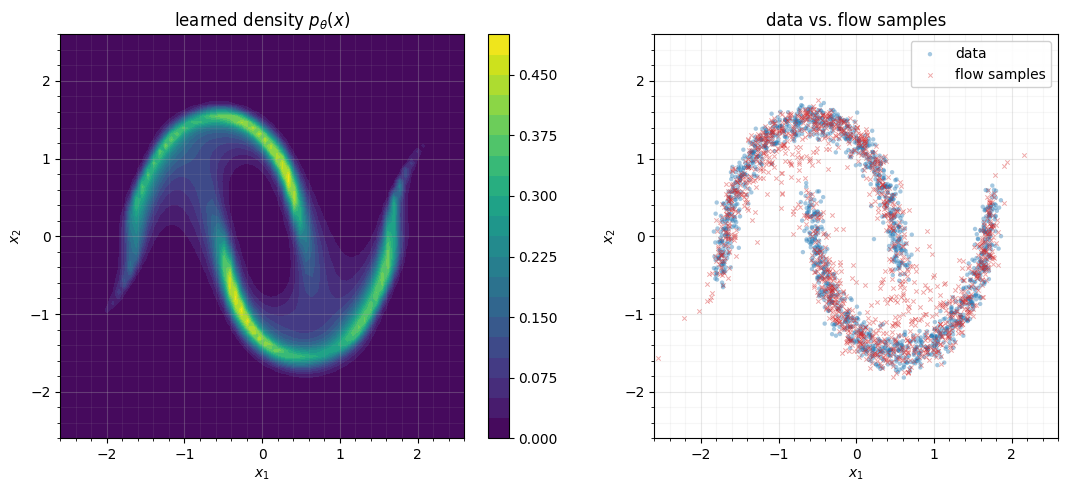
5. The Gaussianization check¶
Density and samples say the generative direction works. The Gaussianization
direction is the inverse map (integrate ): if the flow has
learned the distribution, the pushforward of the data must be standard normal. We
push the data through inverse_and_log_det and run the Part 0 diagnostics — a
latent scatter against the contours, per-axis QQ plots, and the
skew/kurtosis that should both sit at 0.
@eqx.filter_jit
def gaussianize(pts):
return jax.vmap(lambda x: exact_ffjord.inverse_and_log_det(x)[0])(pts)
Z = np.asarray(gaussianize(X))
fig, axes = plt.subplots(1, 3, figsize=(15, 4.6))
# (a) latent scatter with N(0, I) reference rings
ax = axes[0]
ax.scatter(Z[:, 0], Z[:, 1], color=LATENT_COLOR, **SCATTER_KW)
th = np.linspace(0, 2 * np.pi, 200)
for r in (1.0, 2.0):
ax.plot(r * np.cos(th), r * np.sin(th), **GAUSS_KW)
ax.set(title=r"Gaussianized data $z = T^{-1}(x)$", xlabel="$z_1$", ylabel="$z_2$",
xlim=(-3.6, 3.6), ylim=(-3.6, 3.6))
ax.set_aspect("equal")
style_ax(ax)
# (b, c) per-axis QQ plots vs N(0, 1)
for j, ax in enumerate(axes[1:]):
osm, osr = stats.probplot(Z[:, j], dist="norm", fit=False)
ax.scatter(osm, osr, color=LATENT_COLOR, s=8, alpha=0.5, edgecolors="none")
lo, hi = -3.5, 3.5
ax.plot([lo, hi], [lo, hi], **GAUSS_KW)
ax.set(title=f"QQ plot — $z_{j + 1}$", xlabel="theoretical", ylabel="empirical",
xlim=(lo, hi), ylim=(lo, hi))
ax.set_aspect("equal")
style_ax(ax)
fig.tight_layout()
print("Gaussianized data moments (target: mean 0, std 1, skew 0, excess-kurt 0)")
for j in range(2):
z = Z[:, j]
print(f" z_{j + 1}: mean={z.mean():+.3f} std={z.std():.3f} "
f"skew={stats.skew(z):+.3f} exc-kurt={stats.kurtosis(z):+.3f}")Gaussianized data moments (target: mean 0, std 1, skew 0, excess-kurt 0)
z_1: mean=-0.073 std=1.098 skew=-0.034 exc-kurt=-0.516
z_2: mean=+0.043 std=0.752 skew=+0.087 exc-kurt=+0.280
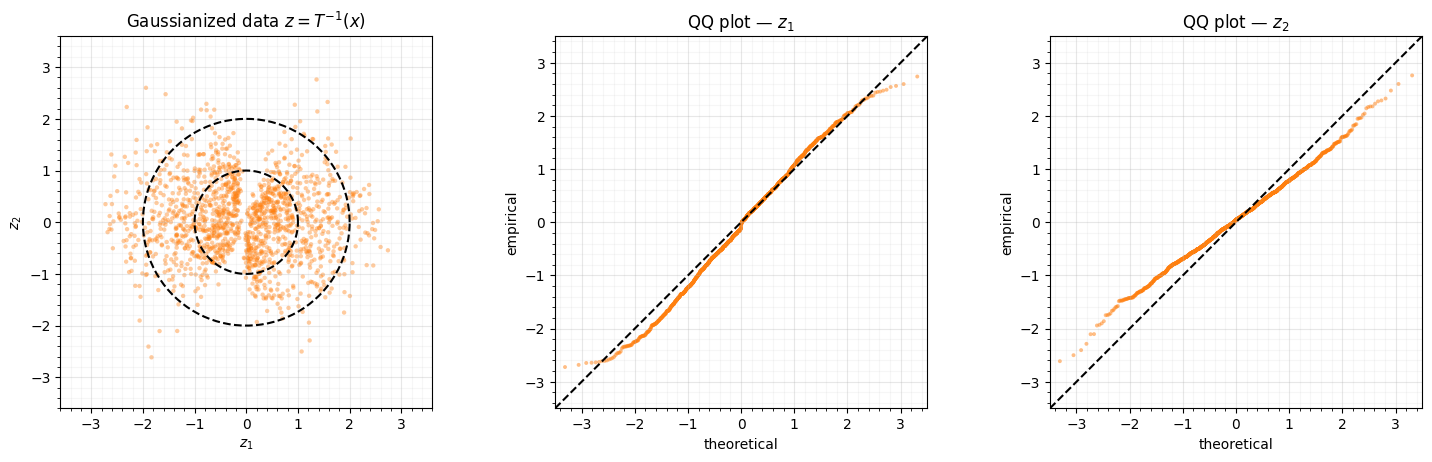
The latent points fill the rings, the QQ plots hug the diagonal, and the moments are close to on both axes. The continuous flow has Gaussianized the two-moons data — the same target as RBIG and the coupling flows, reached by integrating an ODE rather than stacking blocks.
6. Watching the transport¶
What does the flow do? The vector field is the velocity at each
point and time; integrating it moves probability mass. We show it two ways. Left to
right, the quivers are at — the velocity field that
the generation direction follows. Then we integrate the data backwards
() with diffrax and watch the two crescents relax onto the standard
Gaussian: the Gaussianization trajectory.
trained_vf = trained_ffjord.vector_field
qn = 19
qs = jnp.linspace(-lim, lim, qn)
qx, qy = jnp.meshgrid(qs, qs)
q_pts = jnp.stack([qx.ravel(), qy.ravel()], -1)
fig, axes = plt.subplots(1, 3, figsize=(15.5, 5.4), sharex=True, sharey=True)
for ax, t in zip(axes, (0.0, 0.5, 1.0)):
vel = jax.vmap(lambda p: trained_vf(t, p, None))(q_pts)
u = np.asarray(vel[:, 0]).reshape(qn, qn)
v = np.asarray(vel[:, 1]).reshape(qn, qn)
speed = np.hypot(u, v)
ax.scatter(np.asarray(X[:, 0]), np.asarray(X[:, 1]), s=5, alpha=0.25,
color="0.5", edgecolors="none", zorder=1)
ax.quiver(np.asarray(qx), np.asarray(qy), u, v, speed, cmap="magma",
width=0.004, zorder=2)
ax.set(title=rf"$f_\theta(t={t},\, x)$", xlabel="$x_1$", xlim=(-lim, lim), ylim=(-lim, lim))
ax.set_aspect("equal")
style_ax(ax)
axes[0].set_ylabel("$x_2$")
fig.tight_layout()
# Integrate the data backwards (t: 1 -> 0) along the trained vector field: the
# Gaussianization trajectory. We integrate the plain x-dynamics (no log-det
# augmentation needed for the path itself) directly with diffrax.
ts = jnp.linspace(1.0, 0.0, 6)
term = diffrax.ODETerm(lambda t, y, args: trained_vf(t, y, None))
@eqx.filter_jit
def trajectory(x0):
sol = diffrax.diffeqsolve(
term, diffrax.Tsit5(), t0=1.0, t1=0.0, dt0=-0.05, y0=x0,
saveat=diffrax.SaveAt(ts=ts),
stepsize_controller=diffrax.PIDController(rtol=1e-5, atol=1e-5),
)
return sol.ys
paths = np.asarray(jax.vmap(trajectory)(X[:600])) # (600, len(ts), 2)
fig, axes = plt.subplots(1, len(ts), figsize=(18, 3.4), sharex=True, sharey=True)
for k, ax in enumerate(axes):
ax.scatter(paths[:, k, 0], paths[:, k, 1], color=LATENT_COLOR, s=7, alpha=0.4,
edgecolors="none")
for r in (1.0, 2.0):
ax.plot(r * np.cos(th), r * np.sin(th), color="0.3", lw=1.0, ls="--", alpha=0.6)
ax.set(title=f"$t = {float(ts[k]):.1f}$", xlim=(-3.4, 3.4), ylim=(-3.4, 3.4))
ax.set_aspect("equal")
ax.set_xticks([]); ax.set_yticks([])
axes[0].set_ylabel("data → $\\mathcal{N}(0,I)$")
fig.suptitle("Gaussianization trajectory: integrating the data backwards along $f_\\theta$", y=1.04)
fig.tight_layout()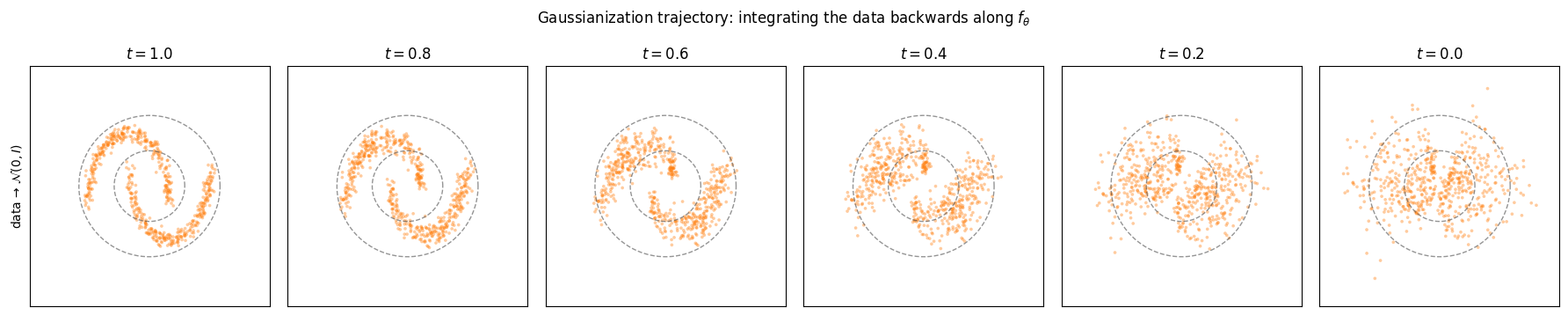
At the points are the two crescents; as the vector field straightens and spreads them into an isotropic Gaussian blob inside the reference rings. This is the continuous analogue of the per-layer pushforward in Part 4’s layer-wise inspection — a smooth path instead of discrete jumps.
7. The cost of the log-det — a forward pointer¶
Everything above used the exact trace, which is fine in 2-D. The exact trace costs Jacobian-vector products per ODE step, so it scales as per step — tolerable here, prohibitive for images. The next notebook replaces it with Hutchinson’s estimator, for a random probe , an -per-step stochastic trace that is what lets free-form CNFs scale. A quick taste of the trade-off on the trained flow:
eval_pts = X[:300]
exact_lp = jax.vmap(exact_dist.log_prob)(eval_pts)
def hutch_log_prob(n_probes, seed):
bij = gf.FFJORD(
jr.key(seed), shape=(2,), vector_field=trained_ffjord.vector_field,
control_dim=0, divergence_mode="hutchinson", n_hutchinson_samples=n_probes,
solver="tsit5", adjoint="direct", rtol=1e-5, atol=1e-5,
)
return jax.vmap(Transformed(Normal(jnp.zeros(2)), bij).log_prob)(eval_pts)
print(f"exact mean log p = {float(jnp.mean(exact_lp)):+.4f} (reference)\n")
print(f"{'n_probes':>9s} {'mean log p':>11s} {'bias':>9s} {'RMSE':>8s}")
for n in (1, 4, 16, 64):
lp = hutch_log_prob(n, 1234 + n)
bias = float(jnp.mean(lp - exact_lp))
rmse = float(jnp.sqrt(jnp.mean((lp - exact_lp) ** 2)))
print(f"{n:>9d} {float(jnp.mean(lp)):>+11.4f} {bias:>+9.4f} {rmse:>8.4f}")exact mean log p = -1.5672 (reference)
n_probes mean log p bias RMSE
1 -0.9277 +0.6395 2.5668
4 -1.8870 -0.3197 1.2834
16 -1.9669 -0.3997 1.6043
64 -1.5472 +0.0200 0.0802
Even a single probe gives a sensible mean NLL (the per-point variance cancels in the average), but the per-point RMSE shrinks like — which matters for anomaly scoring. Notebook 01 makes this precise.
Recap¶
| discrete stack (Parts 4-5) | continuous flow (FFJORD) | |
|---|---|---|
| map | , blocks | , one vector field |
| log-det | ||
| invertibility | architectural (triangular / orthogonal) | free — run the ODE backwards |
| cost | closed-form per block | ODE solve per evaluation; trace per step |
A FFJORD is the infinite-depth limit of a Gaussianization stack: drop the architectural invertibility constraint, pay for it with an ODE solve, and earn an arbitrarily flexible vector field whose log-det is a trace. We confirmed it Gaussianizes two moons onto — the same target, a different machine.
Next up. The trace is the whole game. 01 — Hutchinson trace estimator shows how to estimate it in instead of , the bias/variance of the estimate, and when the exact trace is still worth it.
- Grathwohl, W., Chen, R. T. Q., Bettencourt, J., Sutskever, I., & Duvenaud, D. (2019). FFJORD: Free-Form Continuous Dynamics for Scalable Reversible Generative Models. International Conference on Learning Representations (ICLR).
- Kidger, P. (2021). On Neural Differential Equations [Phdthesis]. University of Oxford.
- Winkler, C., Worrall, D. E., Hoogeboom, E., & Welling, M. (2019). Learning Likelihoods with Conditional Normalizing Flows. arXiv Preprint arXiv:1912.00042.