NonLinear Shallow Water Model - Jet Example
import autoroot
import jax
import jax.numpy as jnp
import numpy as np
import equinox as eqx
import kernex as kex
import finitediffx as fdx
import diffrax as dfx
import xarray as xr
import matplotlib.pyplot as plt
import seaborn as sns
import typing as tp
from tqdm.notebook import tqdm, trange
from jaxtyping import Float, Array, PyTree, ArrayLike
import pandas as pd
from jaxsw._src.domain.base import Domain
from jaxsw._src.models.pde import DynamicalSystem
from jaxsw._src.domain.time import TimeDomain
from jaxsw._src.operators.functional import grid as F_grid
from jaxsw._src.models.sw import Params as SWMParams, State as SWMState
from jaxsw._src.models.sw.nonlinear import ShallowWater2D
sns.reset_defaults()
sns.set_context(context="talk", font_scale=0.7)
jax.config.update("jax_enable_x64", True)
%matplotlib inline
%load_ext autoreload
%autoreload 2| Symbol | Variable | Unit |
|---|---|---|
| Zonal Velocity | ||
| Meridial Velocity | ||
| Mean Height | ||
| Height Deviation | ||
| Topographical height |
Velocities. The represent the zonal and meridional velocities in the x,y directions respectively.
Heights (). The represents the mean hight of the horizontal pressure surface. The represents the height deviation of the horizontal pressure surface from its mean height. represents the topographical height from a reference .
Constants (). is the acceleration due to gravity, is the viscous drag coefficient, and is the kinematic viscosity.
NonLinear SW Example
- Varying Coriolis Force
- NonLinear Terms
- Lateral Friction
- Periodic Boundary Conditions
Domain¶
dx = dy = 5e3
Lx = 200 * dx
Ly = 104 * dy
domain = Domain(xmin=(0, 0), xmax=(Lx, Ly), dx=(dx, dy))
print(f"Nx: {domain.Nx}")
print(f"Lx: {domain.Lx}")
print(f"dx: {domain.dx}")
print(f"Size: {domain.size}")
print(f"nDims: {domain.ndim}")
print(f"Grid Size: {domain.grid.shape}")
print(f"Cell Volume: {domain.cell_volume:_}")Nx: (201, 105)
Lx: (1000000.0, 520000.0)
dx: (5000.0, 5000.0)
Size: (201, 105)
nDims: 2
Grid Size: (201, 105, 2)
Cell Volume: 25_000_000.0
State + Parameters¶
params = SWMParams(
depth=100.0, gravity=9.81, coriolis_f0=2e-4, coriolis_beta=2e-11, domain=domain
)Initial Condition¶
def init_u0(params):
domain = params.domain
# grab coordinate values
y = domain.coords[1]
# grab grid coordinate values
Y = domain.grid[..., 1]
# grab number of points - y direction
n_y = domain.Nx[1]
# grabs physical length of domain - x direction
l_x = domain.Lx[0]
# makes a Gaussian Ridge?
u0 = 10 * np.exp(-((Y - y[n_y // 2]) ** 2) / (0.02 * l_x) ** 2)
return jnp.asarray(u0)
def init_h0(params):
domain = params.domain
# parse parameters and domain
dy = domain.dx[1]
coriolis_param = params.coriolis_param(domain)
gravity = params.gravity
depth = params.depth
# grab grid coordinate values
X, Y = domain.grid[..., 0], domain.grid[..., 1]
# grab number of points - y direction
n_y = domain.Nx[1]
# grabs physical length of domain - x direction
l_x, l_y = domain.Lx
u0 = init_u0(params)
# approximate balance h_y = -(f/g)u
h0 = jnp.cumsum(-dy * u0 * coriolis_param / gravity, axis=1)
# remove mean (make sure h0 is centered around depth)
h0 -= h0.mean()
# add depth
h0 += depth
# add small perturbation
h0 += 0.2 * jnp.sin(X / l_x * 10 * jnp.pi) * jnp.cos(Y / l_y * 8 * jnp.pi)
# boundaries of H must not be used!
h0 = h0.at[0, :].set(jnp.nan)
h0 = h0.at[-1, :].set(jnp.nan)
h0 = h0.at[:, 0].set(jnp.nan)
h0 = h0.at[:, -1].set(jnp.nan)
return jnp.asarray(h0)params = SWMParams(
depth=100.0, gravity=9.81, coriolis_f0=2e-4, coriolis_beta=2e-11, domain=domain
)
h0 = init_h0(params)
u0 = init_u0(params)fig, ax = plt.subplots(ncols=2, figsize=(10, 5))
ax[0].imshow(h0.T, origin="lower", cmap="RdBu_r")
ax[0].set(title="h")
ax[1].imshow(u0.T, origin="lower", cmap="RdBu_r")
ax[1].set(title="u-velocity")
plt.tight_layout()
plt.show()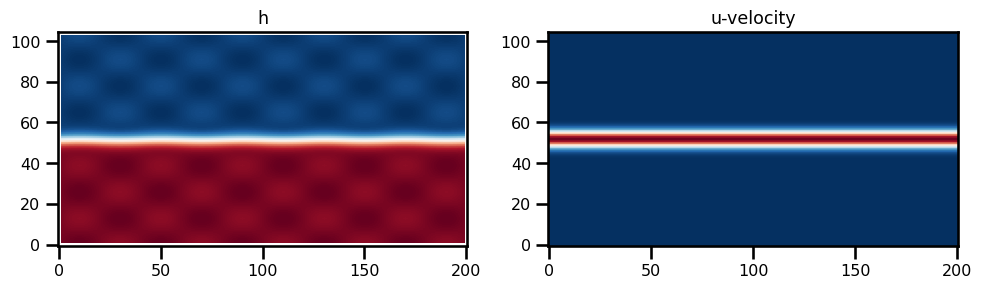
State Revisited¶
from jaxtyping import Array
class State(tp.NamedTuple):
u: Array
v: Array
h: Array
@classmethod
def init_state(cls, params, init_h0, init_u0):
h = init_h0(domain, params)
v = jnp.zeros_like(h)
u = init_u0(domain)
return cls(u=u, v=v, h=h)# state_init = SWMState.init_state(params, init_h=init_h0, init_u=init_u0)
# ds_results = xr.load_dataset("./sw_nonlinear_jet.nc")
# state_init = SWMState(
# u=jnp.asarray(ds_results.u.isel(time=-1)),
# v=jnp.asarray(ds_results.v.isel(time=-1)),
# h=jnp.asarray(ds_results.h.isel(time=-1)),
# )# fig, ax = plt.subplots(ncols=3, figsize=(10, 5))
# ax[0].imshow(state_init.h.T, origin="lower", cmap="RdBu_r")
# ax[0].set(title="h")
# ax[1].imshow(state_init.u.T, origin="lower", cmap="RdBu_r")
# ax[1].set(title="u-velocity")
# ax[2].imshow(state_init.v.T, origin="lower", cmap="RdBu_r")
# ax[2].set(title="v-velocity")
# plt.tight_layout()
# plt.show()Boundary Conditions¶
Period Case:
- h, u, v - periodic in x
- v - northern boundary as zero
NonPeriodic Case:
- h - nothing
- u - east boundary as zero
- v - northern boundary as zero
Height Equation¶
Remember (2)
However, there are some tricky things that we need to do first.
- Pad the H domain to include the u-v components
- Calculate h on the u and v components respectively
- calculate the hu, hv components
- calculate the derivative of dhu_dx and dhv_dy
U-Velocity¶
Remember (2)
Note: written in vector invariant momentum form (see MITGCM manual | Wikipedia)
We also have the standard advection scheme version which follows more closely the equations.
Equation of Motion¶
try:
ds_results = xr.load_dataset("./sw_nonlinear_jet_.nc")
state_init = SWMState(
u=jnp.asarray(ds_results.u.isel(time=-1)),
v=jnp.asarray(ds_results.v.isel(time=-1)),
h=jnp.asarray(ds_results.h.isel(time=-1)),
)
except:
state_init = SWMState.init_state(params, init_h=init_h0, init_u=init_u0)fig, ax = plt.subplots(ncols=3, figsize=(10, 5))
ax[0].imshow(state_init.h.T, origin="lower", cmap="RdBu_r")
ax[0].set(title="h")
ax[1].imshow(state_init.u.T, origin="lower", cmap="RdBu_r")
ax[1].set(title="u-velocity")
ax[2].imshow(state_init.v.T, origin="lower", cmap="RdBu_r")
ax[2].set(title="v-velocity")
plt.tight_layout()
plt.show()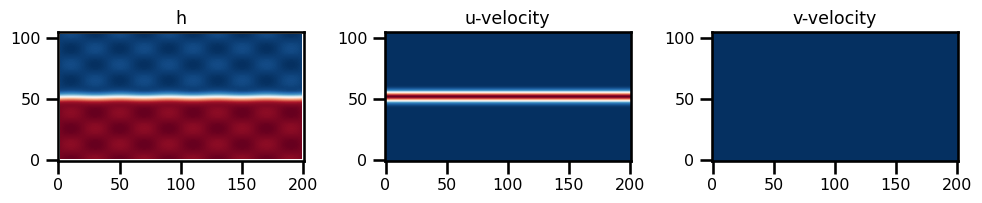
state_update = ShallowWater2D.equation_of_motion(0, state_init, params)
state_update_adv = ShallowWater2D.equation_of_motion_advection(0, state_init, params)fig, ax = plt.subplots(ncols=3, figsize=(15, 5))
pts = ax[0].imshow(state_update.h.T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts, fraction=0.025)
ax[0].set(title="h")
pts = ax[1].imshow(state_update.u.T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts, fraction=0.025)
ax[1].set(title="u-velocity")
pts = ax[2].imshow(state_update.v.T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts, fraction=0.025)
ax[2].set(title="v-velocity")
plt.tight_layout()
plt.show()
fig, ax = plt.subplots(ncols=3, figsize=(15, 5))
pts = ax[0].imshow(state_update_adv.h.T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts, fraction=0.025)
ax[0].set(title="h")
pts = ax[1].imshow(state_update_adv.u.T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts, fraction=0.025)
ax[1].set(title="u-velocity")
pts = ax[2].imshow(state_update_adv.v.T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts, fraction=0.025)
ax[2].set(title="v-velocity")
plt.tight_layout()
plt.show()
fig, ax = plt.subplots(ncols=3, figsize=(15, 5))
pts = ax[0].imshow(state_update.h.T - state_update_adv.h.T, origin="lower", cmap="Reds")
plt.colorbar(pts, fraction=0.025)
ax[0].set(title="h")
pts = ax[1].imshow(state_update.u.T - state_update_adv.u.T, origin="lower", cmap="Reds")
plt.colorbar(pts, fraction=0.025)
ax[1].set(title="u-velocity")
pts = ax[2].imshow(state_update.v.T - state_update_adv.v.T, origin="lower", cmap="Reds")
plt.colorbar(pts, fraction=0.025)
ax[2].set(title="v-velocity")
plt.tight_layout()
plt.show()


fig, ax = plt.subplots(ncols=3, figsize=(15, 5))
pts = ax[0].imshow(state_update.h[2:-2, 2:-2].T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts, fraction=0.025)
ax[0].set(title="h")
pts = ax[1].imshow(state_update.u[2:-2, 2:-2].T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts, fraction=0.025)
ax[1].set(title="u-velocity")
pts = ax[2].imshow(state_update.v[2:-2, 2:-2].T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts, fraction=0.025)
ax[2].set(title="v-velocity")
plt.tight_layout()
plt.show()
fig, ax = plt.subplots(ncols=3, figsize=(15, 5))
pts = ax[0].imshow(state_update_adv.h[2:-2, 2:-2].T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts, fraction=0.025)
ax[0].set(title="h")
pts = ax[1].imshow(state_update_adv.u[2:-2, 2:-2].T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts, fraction=0.025)
ax[1].set(title="u-velocity")
pts = ax[2].imshow(state_update_adv.v[2:-2, 2:-2].T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts, fraction=0.025)
ax[2].set(title="v-velocity")
plt.tight_layout()
plt.show()
fig, ax = plt.subplots(ncols=3, figsize=(15, 5))
pts = ax[0].imshow(
state_update.h[2:-2, 2:-2].T - state_update_adv.h[2:-2, 2:-2].T,
origin="lower",
cmap="Reds",
)
plt.colorbar(pts, fraction=0.025)
ax[0].set(title="h")
pts = ax[1].imshow(
state_update.u[2:-2, 2:-2].T - state_update_adv.u[2:-2, 2:-2].T,
origin="lower",
cmap="Reds",
)
plt.colorbar(pts, fraction=0.025)
ax[1].set(title="u-velocity")
pts = ax[2].imshow(
state_update.v[2:-2, 2:-2].T - state_update_adv.v[2:-2, 2:-2].T,
origin="lower",
cmap="Reds",
)
plt.colorbar(pts, fraction=0.025)
ax[2].set(title="v-velocity")
plt.tight_layout()
plt.show()


Time Stepping¶
# TEMPORAL DISCRETIZATION
# initialize temporal domain
dt = 0.125 * min(domain.dx[0], domain.dx[1]) / np.asarray(params.phase_speed)
print(f"Step Size (dt): {pd.to_timedelta(dt, unit='second')}")
tmin = 0.0
tmax = pd.to_timedelta(2.0, unit="days").total_seconds()
num_save = 100
print(f"tmin: {pd.to_timedelta(tmin, unit='second')}")
print(f"tmax: {pd.to_timedelta(tmax, unit='second')}")Step Size (dt): 0 days 00:00:19.954714275
tmin: 0 days 00:00:00
tmax: 2 days 00:00:00
pd.to_timedelta(dt, unit="seconds")Timedelta('0 days 00:00:19.954714275')import pandas as pdt_domain = TimeDomain(tmin=tmin, tmax=tmax, dt=dt)
ts = jnp.linspace(tmin, tmax, num_save)
saveat = dfx.SaveAt(ts=ts)
# DYNAMICAL SYSTEM
dyn_model = ShallowWater2D(t_domain=t_domain, saveat=saveat)Integration¶
# Euler, Constant StepSize
solver = dfx.Dopri5()
# Tolerances
stepsize_controller = dfx.ConstantStepSize()
# rtol = 1e-3
# atol = 1e-3
# stepsize_controller = dfx.PIDController(
# pcoeff=0.3, icoeff=0.4, rtol=rtol, atol=atol, #dtmax=dt
# )
# SPATIAL DISCRETIZATION
params_init = SWMParams(
depth=100.0, gravity=9.81, coriolis_f0=2e-4, coriolis_beta=2e-11, domain=domain
)
state_init = SWMState.init_state(params_init, init_h=init_h0, init_u=init_u0)%%time
# integration
sol = dfx.diffeqsolve(
# terms=dfx.ODETerm(dyn_model.equation_of_motion_advection),
terms=dfx.ODETerm(dyn_model.equation_of_motion),
solver=solver,
t0=ts.min(),
t1=ts.max(),
dt0=dt,
y0=state_init,
saveat=saveat,
args=params_init,
stepsize_controller=stepsize_controller,
max_steps=None,
)CPU times: user 1min 4s, sys: 5.68 s, total: 1min 10s
Wall time: 1min
for ivar in sol.ys:
fig, ax = plt.subplots(figsize=(12, 8))
pts = ax.imshow(ivar[-1][2:-2, 2:-2].T, origin="lower", cmap="RdBu_r")
plt.colorbar(pts)
plt.tight_layout()
Analysis¶
ds_results = xr.Dataset(
data_vars={
"u": (("time", "x", "y"), sol.ys.u),
"v": (("time", "x", "y"), sol.ys.v),
"h": (("time", "x", "y"), sol.ys.h),
},
coords={
"time": (("time"), sol.ts),
"x": (("x"), domain.coords[0]),
"y": (("y"), domain.coords[1]),
},
)
ds_results# ds_results.to_netcdf("./sw_nonlinear_jet.nc")from xmovie import Movie
from pathlib import Path
from matplotlib import ticker
from xmovie import Movie
from pathlib import Path
from matplotlib import ticker
def custom_plot_h_ke_layers(ds, fig, tt, *args, **kwargs):
sub = ds.isel(time=tt)
time = sub.v.time.values / 86400
xlim = kwargs.pop("xlim", None)
ylim = kwargs.pop("ylim", None)
vmin_h = kwargs.pop("vmin_h", sub.h.isel(x=slice(1, -1), y=slice(1, -1)).min())
vmax_h = kwargs.pop("vmax_h", sub.h.isel(x=slice(1, -1), y=slice(1, -1)).max())
cmap = kwargs.pop("cmap", "viridis")
fig.set_size_inches(12, 4.5)
ax = fig.subplots(
ncols=2,
)
# HEIGHT
cbar_kwargs = {"label": "Height [m]"}
pts = sub.h.isel(x=slice(1, -1), y=slice(1, -1)).plot.pcolormesh(
ax=ax[0],
cmap="viridis",
add_colorbar=True,
vmin=vmin_h,
vmax=vmax_h,
cbar_kwargs=cbar_kwargs,
# **kwargs
)
loc = ticker.MaxNLocator(6)
levels = loc.tick_values(vmin_h, vmax_h)
sub.h.isel(x=slice(1, -1), y=slice(1, -1)).plot.contour(
ax=ax[0],
levels=levels,
vmin=vmin_h,
vmax=vmax_h,
alpha=0.5,
linewidths=1,
cmap="black",
linestyles=np.where(levels >= 0, "-", "--"),
)
# ax.set_aspect('equal')
pts = ax[0].set(xlabel="x [m]", ylabel="y [m]", title=f"Time: {time:.4f} day(s)")
# U-VELOCITY
cbar_kwargs = {"label": "√ Kinetic Energy [ms$^{-2}$]"}
vmin_ke = kwargs.pop("vmin_ke", sub.ke.isel(x=slice(1, -1), y=slice(1, -1)).min())
vmax_ke = kwargs.pop("vmax_ke", sub.ke.isel(x=slice(1, -1), y=slice(1, -1)).max())
pts = sub.ke.isel(x=slice(1, -2), y=slice(1, -2)).plot.pcolormesh(
ax=ax[1],
cmap="YlGnBu_r",
add_colorbar=True,
vmin=vmin_ke,
vmax=vmax_ke,
cbar_kwargs=cbar_kwargs
# **kwargs
)
loc = ticker.MaxNLocator(6)
levels = loc.tick_values(vmin_ke, vmax_ke)
sub.ke.isel(x=slice(1, -2), y=slice(1, -2)).plot.contour(
ax=ax[1],
levels=levels,
vmin=vmin_ke,
vmax=vmax_ke,
alpha=0.5,
linewidths=1,
cmap="black",
linestyles=np.where(levels >= 0, "-", "--"),
)
# ax.set_aspect('equal')
pts = ax[1].set(xlabel="x [m]", ylabel="y [m]", title=f"Time: {time:.4f} day(s)")
plt.tight_layout()
return None, None
from pathlib import Path
def create_movie(
var,
name,
plotfunc=custom_plot_h_ke_layers,
framedim: str = "steps",
file_path=None,
**kwargs,
):
if file_path is not None:
file_name = Path(file_path).joinpath(f"movie_{name}.gif")
else:
file_name = Path(f"./movie_{name}.gif")
mov = Movie(
var, plotfunc=plotfunc, framedim=framedim, **kwargs, dpi=200, input_check=False
)
mov.save(
file_name,
remove_movie=False,
progress=True,
framerate=3,
gif_framerate=3,
overwrite_existing=True,
gif_resolution_factor=0.5,
parallel=False,
)
return None%matplotlib inline
vmin_h = ds_results.h.isel(x=slice(2, -2), y=slice(2, -2)).min()
vmax_h = ds_results.h.isel(x=slice(2, -2), y=slice(2, -2)).max()
ds_results["ke"] = np.sqrt(0.5 * (ds_results.u**2 + ds_results.v**2))
vmin_ke = ds_results.ke.isel(x=slice(2, -2), y=slice(2, -2)).min()
vmax_ke = ds_results.ke.isel(x=slice(2, -2), y=slice(2, -2)).max()
mov = Movie(
ds_results.transpose("time", "y", "x"),
plotfunc=custom_plot_h_ke_layers,
framedim="time",
input_check=False,
vmin_h=vmin_h,
vmax_h=vmax_h,
vmin_ke=vmin_ke,
vmax_ke=vmax_ke,
)
mov.preview(60)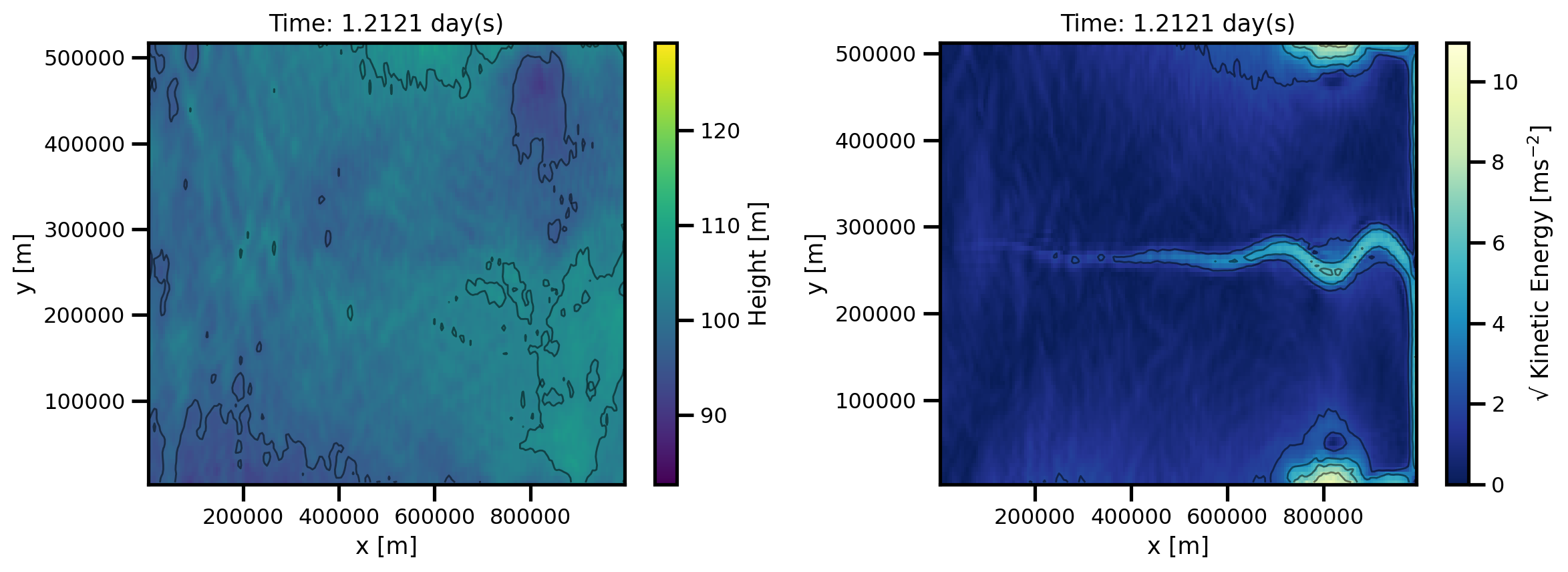
create_movie(
ds_results.transpose(
"time", "y", "x"
), # .sel(time=slice("2017-02-01", "2017-03-01")),
# name="swe_nonlinear_jet_adv_linear",
name="swe_nonlinear_jet_vort_upwind",
plotfunc=custom_plot_h_ke_layers,
file_path="./",
framedim="time",
cmap="viridis",
robust=True,
vmin_h=vmin_h,
vmax_h=vmax_h,
vmin_ke=vmin_ke,
vmax_ke=vmax_ke,
)