1.2 - Iterative Gaussianization#
!pip install "git+https://github.com/IPL-UV/rbig.git"
Collecting git+https://github.com/IPL-UV/rbig.git
Cloning https://github.com/IPL-UV/rbig.git to /tmp/pip-req-build-gwuvcmry
Running command git clone -q https://github.com/IPL-UV/rbig.git /tmp/pip-req-build-gwuvcmry
Resolved https://github.com/IPL-UV/rbig.git to commit bb115eb0720a53721be03087177c1470e831f5ee
import sys, os
from pyprojroot import here
# spyder up to find the root
root = here(project_files=[".here"])
# append to path
sys.path.append(str(root))
%load_ext autoreload
%autoreload 2
Import Packages#
from typing import Union, List
import numpy as np
from sklearn.datasets import make_moons
from scipy import stats
# Packages
import numpy as np
from sklearn.decomposition import PCA
from picard import Picard
import pytorch_lightning as pl
# Plot
import matplotlib.pyplot as plt
import corner
from tqdm.notebook import trange, tqdm
import wandb
pl.seed_everything(1234)
%load_ext autoreload
%autoreload 2
Global seed set to 1234
The autoreload extension is already loaded. To reload it, use:
%reload_ext autoreload
Logging#
# TODO
Data#
ntrain = 100_000
nvalid = 5_000
ntest = 10_000
nplot = 1_000_000
noise = 0.1
random_state = 123
train_data = make_moons(n_samples=ntrain, noise=noise, random_state=random_state)[0]
val_data = make_moons(n_samples=nvalid, noise=noise, random_state=random_state)[0]
test_data = make_moons(n_samples=ntest, noise=noise, random_state=random_state*10)[0]
plot_data = make_moons(n_samples=nplot, noise=noise, random_state=random_state*10)[0]
def make_checkerboard(n_samples):
x1 = np.random.rand(n_samples) * 4 - 2
x2_ = np.random.rand(n_samples) - np.random.randint(0, 2, [n_samples]) * 2
x2 = x2_ + np.floor(x1) % 2
data = np.vstack([x1, x2]).T * 2
return data
train_data = make_checkerboard(n_samples=ntrain,)
val_data = make_checkerboard(n_samples=nvalid, )
test_data = make_checkerboard(n_samples=ntest, )
plot_data = make_checkerboard(n_samples=nplot, )
train_data.shape
(100000, 2)
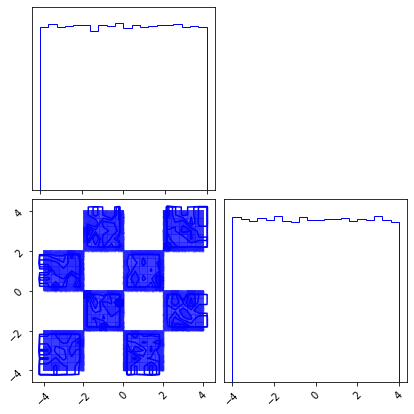
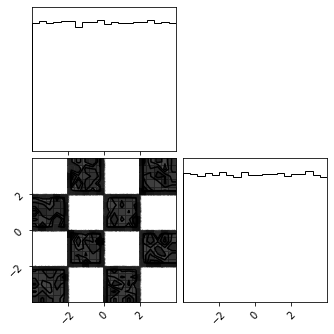
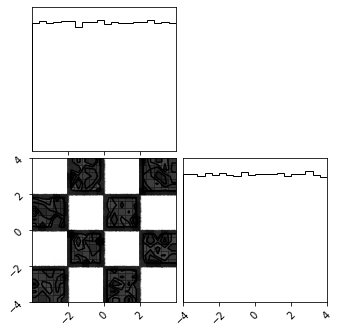
Plot Data#
fig = plt.figure(figsize=(7, 7))
corner.corner(train_data, color="blue", fig=fig)
plt.show()
Flow Transformation#
from rbig._src.uniform import MarginalHistogramUniformization, MarginalKDEUniformization
from rbig._src.invcdf import InverseGaussCDF
from rbig._src.base import CompositeBijector
marg_hist_bijector = MarginalHistogramUniformization(X=train_data, bins="sqrt", bound_ext=0.0)
marg_hist_bijector = MarginalKDEUniformization(X=train_data, bound_ext=0.2)
invcdf = InverseGaussCDF(eps=1e-5)
bijectors = [marg_hist_bijector, invcdf]
marg_gauss_bijector = CompositeBijector(bijectors)
X_g = marg_gauss_bijector.forward(train_data)
X_ldj = marg_gauss_bijector.gradient(train_data)
t = np.random.rand(10,2)
t.min(), t.max()
(0.15381230799880152, 0.949722702063876)
fig = corner.corner(X_g)
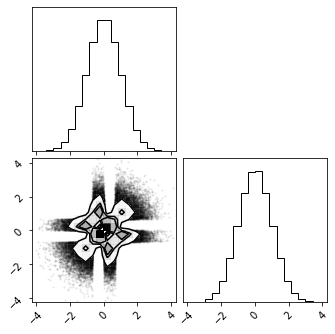
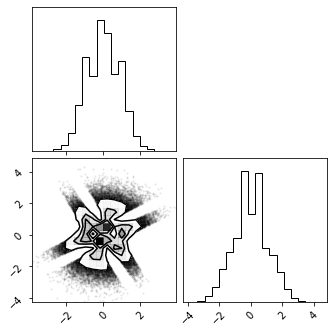
Rotation#
from rbig._src.rotation import PCARotation, RandomRotation
pca_bijector = PCARotation(X_g)
randrot_bijector = RandomRotation(X_g)
X_r = randrot_bijector.forward(X_g)
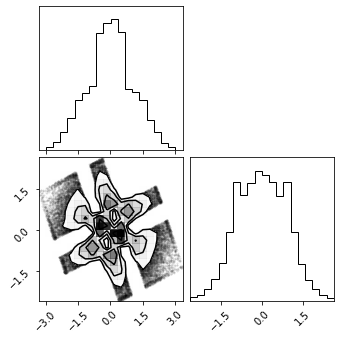
fig = corner.corner(X_r)
# X_g_inv = ica_bijector.forward(X_r)
# fig = corner.corner(X_g_inv)
marg_hist_bijector = MarginalHistogramUniformization(X=train_data)
invcdf = InverseGaussCDF(eps=1e-5)
pca_bijector = RandomRotation(X_g)
bijectors = [marg_hist_bijector, invcdf, pca_bijector]
marg_gauss_bijector = CompositeBijector(bijectors)
X_g = marg_gauss_bijector.forward(train_data)
fig = corner.corner(X_g)
More Transformations#
from rbig._src.losses import neg_entropy_normal, negative_log_likelihood
X_train = train_data.copy()
# X_train += 0.1 * np.random.rand(*X_train.shape)
X_valid = val_data.copy()
X_ldj_train = np.zeros(X_train.shape[0])
X_ldj_valid = np.zeros(X_valid.shape[0])
n_layers = 100
alpha = 0.98
transformations = []
train_losses = []
valid_losses = []
with trange(n_layers) as pbar:
for ilayer in pbar:
# marginal uniformization
ibijector = MarginalHistogramUniformization(X=X_train, bound_ext=0.3, bins="auto", alpha=1e-10)
# ibijector = MarginalKDEUniformization(X=X_train, bound_ext=0.3, fft=False, n_quantiles=50, grid_size=100)
transformations.append(ibijector)
# train data
X_ldj_train += ibijector.gradient(X_train)
X_train = ibijector.forward(X_train)
# valid data
X_ldj_valid += ibijector.gradient(X_valid)
X_valid = ibijector.forward(X_valid)
# inverse cdf transformation
ibijector = InverseGaussCDF(1e-7)
# save bijector
transformations.append(ibijector)
# train data
X_ldj_train += ibijector.gradient(X_train)
X_train = ibijector.forward(X_train)
# valid data
X_ldj_valid += ibijector.gradient(X_valid)
X_valid = ibijector.forward(X_valid)
# rotation
ibijector = PCARotation(X=X_train)
# save bijector
transformations.append(ibijector)
# train data
X_ldj_train += ibijector.gradient(X_train)
X_train = ibijector.forward(X_train)
# valid data
X_ldj_valid += ibijector.gradient(X_valid)
X_valid = ibijector.forward(X_valid)
# if (ilayer+1) % 5 == 0:
# fig = corner.corner(X)
# calculate the loss
loss_train = negative_log_likelihood(X_train, X_ldj_train)
loss_valid = negative_log_likelihood(X_valid, X_ldj_valid)
k2, p = stats.normaltest(X_valid, axis=None)
neg_ent = neg_entropy_normal(X_valid)
pbar.set_description(f"Loss (Train): {loss_train:.4f} | Loss (Valid): {loss_valid:.4f} | NormTest: {p:.2e} | KL Normal: {neg_ent.sum():.5f}")
train_losses.append(loss_train)
valid_losses.append(loss_valid)
k2, p = stats.normaltest(X_valid, axis=None)
neg_ent = neg_entropy_normal(X_valid)
k2, p, neg_ent.sum()
(0.8900466592917546, 0.6408093260032797, 0.003495116498621587)
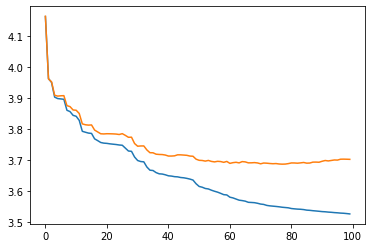
fig, ax = plt.subplots()
ax.plot(train_losses)
ax.plot(valid_losses)
plt.show()
from rbig._src.base import FlowModel
# init base distribution
base_dist = stats.multivariate_normal(mean=np.zeros(2), cov=np.ones(2))
# init flow model
gf_model = FlowModel(transformations, base_dist)
# score test samples
gf_model.score_samples(test_data)
/datadrive/eman/miniconda3/envs/gaussflow-gpu/lib/python3.8/site-packages/rbig/_src/base.py:73: RuntimeWarning: divide by zero encountered in log
return -np.mean(np.log(prob))
inf
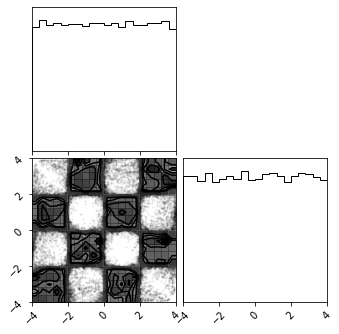
Forward Transformation#
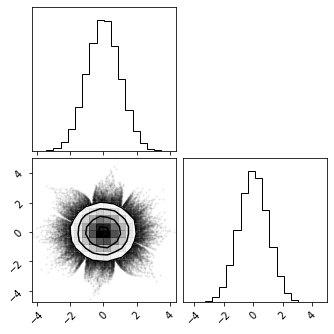
X_g = gf_model.forward(train_data)
fig = corner.corner(X_g)
Inverse Transform#
X_approx = gf_model.inverse(X_g)
fig = corner.corner(train_data)
fig = corner.corner(X_approx)
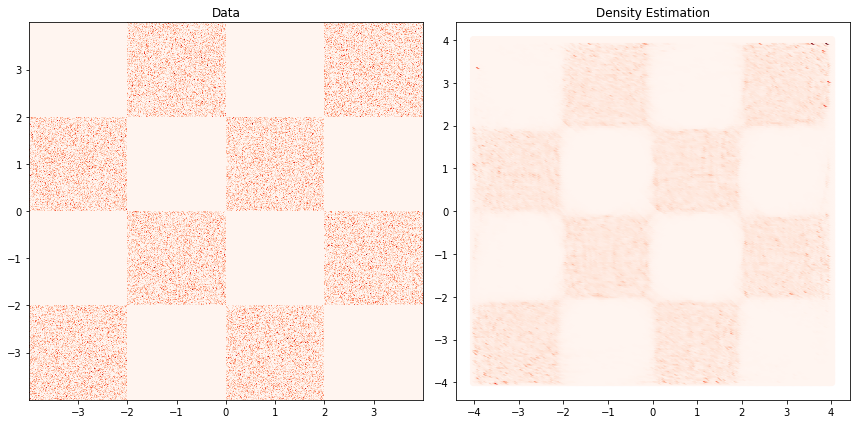
Density Estimation#
n_grid = 200
buffer = 0.01
xline = np.linspace(test_data[:, 0].min() - buffer, train_data[:, 0].max() + buffer, n_grid)
yline = np.linspace(test_data[:, 1].min() - buffer, train_data[:, 1].max() + buffer, n_grid)
xgrid, ygrid = np.meshgrid(xline, yline)
xyinput = np.concatenate([xgrid.reshape(-1, 1), ygrid.reshape(-1, 1)], axis=1)
X_prob = gf_model.predict_proba(xyinput)
fig, ax = plt.subplots(1, 2, figsize=(12,6))
ax[0].set_title('Data')
ax[0].hist2d(train_data[...,0], train_data[...,1], cmap="Reds", bins=512, density=True)
# ax[0].set_xlim([-4, 4]); ax[0].set_ylim([-4, 4]); ax[0].axis('off')
ax[1].set_title('Density Estimation')
ax[1].scatter(xyinput[...,0], xyinput[...,1], c=X_prob, cmap="Reds",)
# ax[1].set_xlim([-4, 4]); ax[1].set_ylim([-4, 4]); ax[1].axis('off')
plt.tight_layout()
plt.show()
Sampling#
%%time
X_samples = gf_model.sample(200_000)
CPU times: user 1min 3s, sys: 3.25 s, total: 1min 6s
Wall time: 5.62 s
fig = corner.corner(X_samples)